Recursos y Referencias
Herramientas y conocimientos como recursos comunes y accesibles
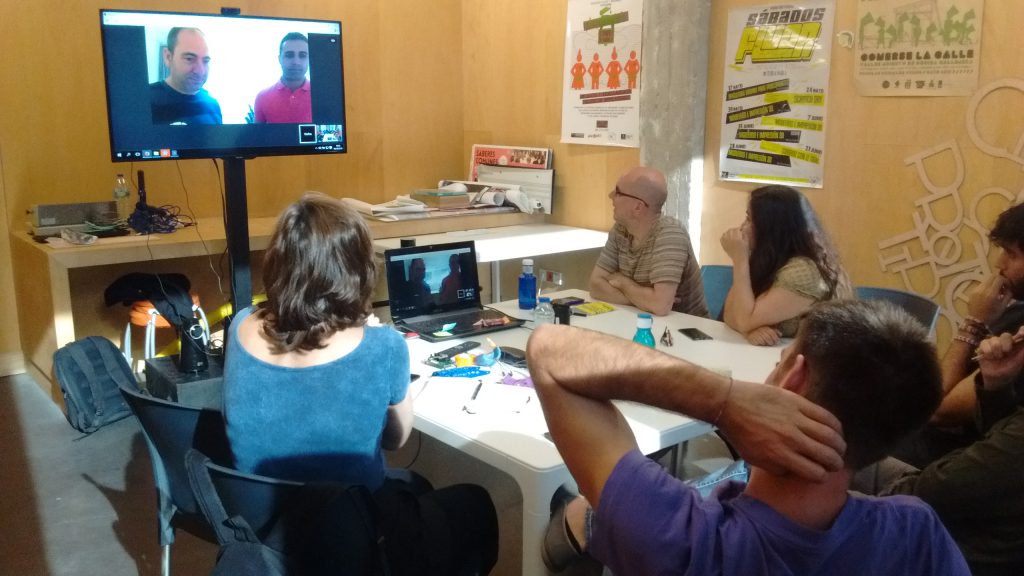
En el mismo espacio y con nuevos asistentes que acompañan a los que repiten de la semana anterior, empezamos una nueva sesión de encuentros y debates sobre ayudas técnicas autofabricadas y autogestionadas. En este caso, el tema para abordar son los recursos on-line y espacios de referencias de este tipo de sistemas. Un tema clave tratándose de proyectos en código abierto que atañen a la generación de comunidades, al papel de cada agente del proceso y a la definición de las propias ayudas compartidas.
Para responder a muchas de estas cuestiones y plantear muchos otros debates contamos esta tarde con la presencia de Santiago Más y Alberto Martínez a través de la red. Santiago es voluntario en la ONG África Directo y Fundación Yeyo, por una parte, realizan proyectos para cubrir necesidades básicas de poblaciones rurales de varios países de África y por otro lado apoyan a familias con dificultades en el entorno sanitario en Madrid. Santiago en la actualidad forma parte del proyecto Trucos Optimistas con el que están desarrollando una plataforma on-line sobre ayudas técnicas. Al otro lado de la línea está Alberto Martinez, diseñador web que lleva varios años en diferentes proyectos de asistencias técnicas, entre ellas prótesis de Enable, y participando en foros sobre este tipo de recursos como el Encuentro Bajo Coste. Actualmente está trabajando entre otras cosas en una plataforma llamada 3DLan centrada en las ayudas técnicas impresas en 3D. 
La tarde comienza con una pequeña introducción de los proyectos y trayectorias de los dos invitados que pronto se convierte en un diálogo por las cuestiones que plantean y que compartimos los asistentes sobre el proyecto Autofabricantes.
En primer lugar, Santiago nos recuerda que todos necesitamos o vamos a necesitar algún tipo de accesorio que nos facilite nuestras labores diarias. Además, nos explica que la palabra Truco se debe en parte a considerar no solamente los objetos como una solución, sino por tener en cuenta que también una idea o una forma de hacer es a veces lo importante. La plataforma Trucos Optimistas que nos presenta se divide en tres partes principales: Necesidades que puede solicitar cualquiera; Creadores que ayudan a pensar y dar forma al truco o el objeto; y los Colaboradores que facilitan la fabricación del objeto o truco. Con este sistema básico buscan ir añadiendo peticiones y personas que se involucren en desarrollarlas y darles solución creando debates y diálogos entre las partes. La intención es que la plataforma se autogestione en su funcionamiento y sea la comunidad la que la alimente y mantenga.
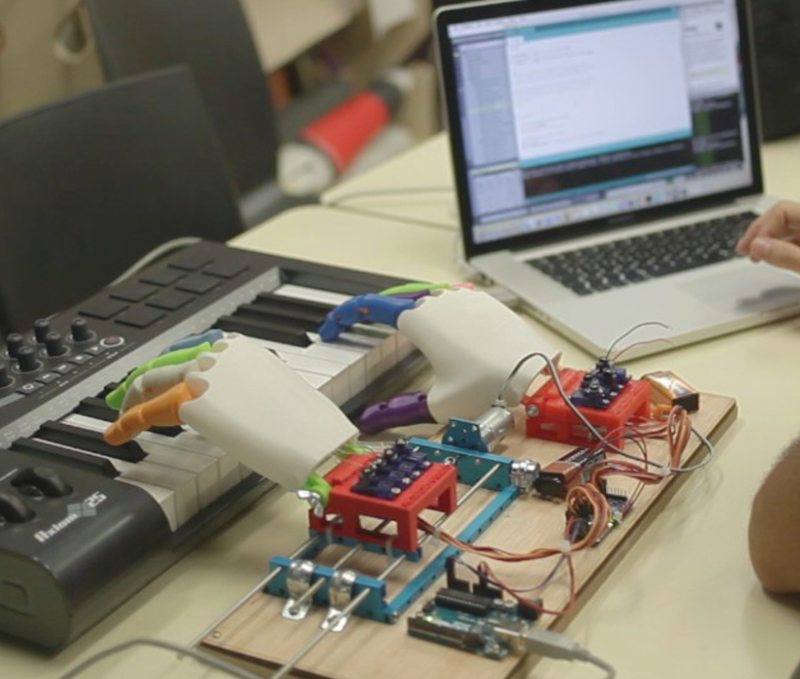
Alberto nos cuenta el origen y estructura de 3DLan como espacio de conexión de desarrolladores de proyectos e iniciativas en torno a las asistencias técnicas personales, espacios de trabajo en los cuales existen programas de inserción laboral de personas con diversidad y, por último, fabricantes o espacios de soporte. El proyecto nace desde la recopilación y desarrollo de pequeños diseños, cosas sencillas que pueden suponer una ayuda importante y conectarlo con la potencia que permite la impresión 3D como tecnología para fabricarse recursos y adaptarlos. Para comenzar han empezado a realizar cursos de capacitación básica en espacios de trabajo para que las personas interesadas se fabriquen y compartan sus ayudas técnicas.
Pronto empezamos a hablar de las inquietudes que llevan a montar estos proyectos y las dificultades encontradas. Santiago nos dice que al inicio todo son preguntas e incertidumbres, pero se van resolviendo conforme se trabaja. Alberto nos completa la visión y aporta un concepto importante con el que todos estamos de acuerdo, la 2ª etapa de la impresión 3D. Tras unos años con la novedad de la impresión 3D, la red se ha llenado de objetos y repositorios enormes. Ha llegado una segunda etapa en la que los contenidos son más específicos, las comunidades de trabajo más cohesionadas y la información de mayor calidad. Se evoluciona a comunidades o proyectos que utilizan la impresión 3D para algún fin concreto como es el caso de las asistencias técnicas.
David Gómez (que nos hablará la última jornada sobre participación en proyectos de ciencia ciudadana) nos pregunta por el papel de las familias más allá de ser receptoras de estos proyectos. Tanto Santiago como Alberto como Mila (de Exando una mano) cuentan el origen de cada proyecto, que nace desde una relación personal y de afecto con una familia que plantea generar una alternativa a la ofrecida por el sistema. Nacen de conocer a las personas que plantean la posibilidad de hacerse sus propias ayudas, de conectarse con otros proyectos, de generar redes de ayuda. Entender que el contacto directo y la confianza de las familias es el origen y final de cada pequeño avance y proyecto es lo más importante. Aunque se habló en otra parte de la conversación, es destacable la importancia de los terapeutas ocupacionales como una parte más de la familia que señaló Santiago. Remarcó la necesidad de buscar la calidad de las relaciones y lo que se hace antes que la cantidad de la producción de ayudas. Por otro lado, Alberto añade que no es necesario crear nuevas comunidades, sino insertar nuevas lógicas, técnicas y mejoras en redes y comunidades ya existentes.
El debate continúa y de nuevo David nos centra la mirada en las personas, el capital humano y las relaciones que han permitido generar un objeto o truco. Ya que estamos tratando de compartir objetos, nos pregunta por esa parte, la propia creación de los objetos. Las respuestas no son fáciles, pues contar y reflejar los procesos e historias que hay detrás de cada solución es complejo y requiere trabajo, pero en todos los proyectos se tiene en cuenta ya que no es solamente un repositorio. A veces, las soluciones del día a día son las más importantes y le dan frescura a las ideas y procesos.
La conversación gira de nuevo hacia una mirada más al futuro, por una parte, Luis nos pregunta si tendemos hacia la especialización en el mundo de la impresión 3D y por otra parte Mila nos pregunta sobre la gestión a largo plazo de proyectos y comunidades de ayudas técnicas personales. A la primera cuestión cada asistente responde con más o menos catastrofismo, pero con la confianza en la existencia de redes de apoyo o fabricación en paralelo a las formas que adopte el mercado. Respecto a la cuestión de los proyectos, todos los asistentes tenemos dudas, todos sabemos la dificultad de mantener los compromisos de los colaboradores, la cercanía con las familias y entender el tiempo como un recurso limitado y preciado. Además, Santiago nos ilustra con su experiencia en África Directo advirtiéndonos de los riesgos de crear “elefantes blancos”, es decir, soluciones temporales que sin una continuidad generan necesidades que después no se p ueden cubrir y que antes no existían.

La charla continua de manera distendida con la convicción de los participantes en la necesidad de seguir debatiendo, de seguir conectando proyectos e iniciativas y sobre todo de seguir compartiendo los pequeños avances y conocimientos que se van generando en cada rincón. Por supuesto, queda mucho trabajo por delante, entre ello crea un espacio más amplio a las familias implicadas o interesadas en estos proyectos. Continuaremos en la siguiente sesión en este mismo punto y nos volveremos a encontrar. Gracias a todos los asistentes y en especial a Alberto y Santiago. ¡Seguimos!

 Avances en Desarrollo:
Avances en Desarrollo:




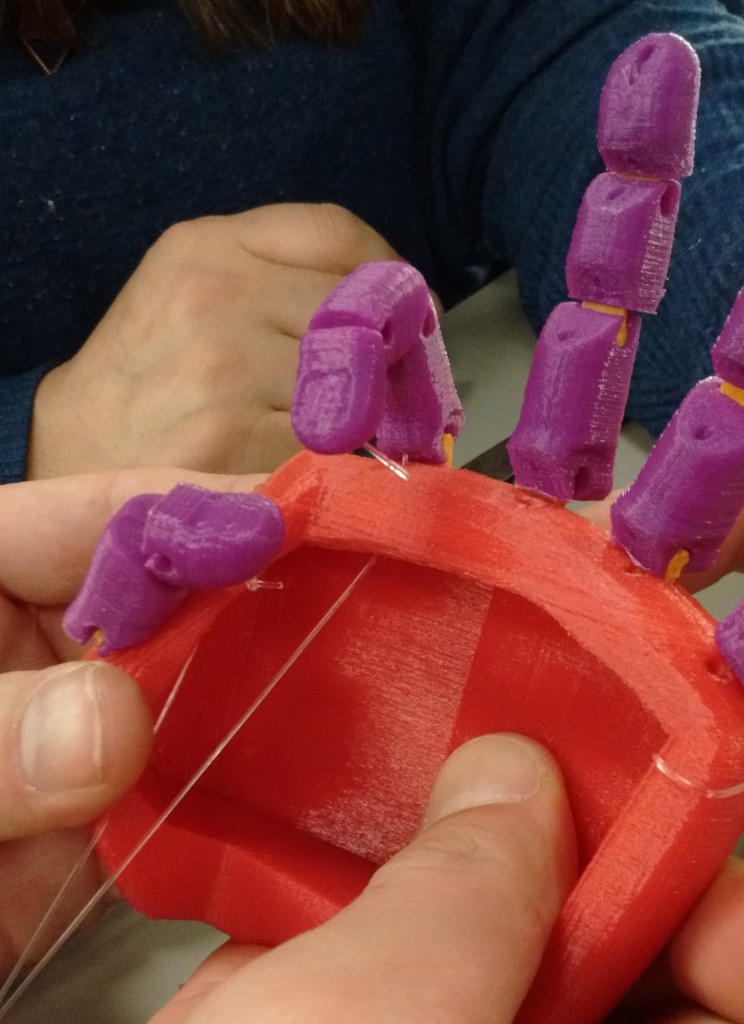 Para continuar con el modelado se hace URGENTE escanear al menos el muñón del niño de Consuelo, se necesita para tener una referencia con los tamaños de la edad de la prótesis con la que estamos trabajando. à Durante esta semana nos hemos puesto en contacto con David para al menos poder escanearla con la Kinect que nos ha ofrecido. Lo haremos el viernes 4 a las 18:00.
Para continuar con el modelado se hace URGENTE escanear al menos el muñón del niño de Consuelo, se necesita para tener una referencia con los tamaños de la edad de la prótesis con la que estamos trabajando. à Durante esta semana nos hemos puesto en contacto con David para al menos poder escanearla con la Kinect que nos ha ofrecido. Lo haremos el viernes 4 a las 18:00.