Comenzamos la reunión general en la que tenemos varias novedades principales a tratar además de poner en común los avances de los diferentes equipos de trabajo. Están también dos nuevos compañeros de grupo, Francisco y Gerardo que se suman al proyecto de una u otra manera.
Resumen, los temas principales tratados han sido:
- Revisar la encuesta definitiva para mandarla a los padres. –> Ya tenemos encuesta
- Proponer unas jornadas de debate sobre los temas que van saliendo en las reuniones. –> Pensar temas, posibles invitados y fechas para comenzar.
- Proponer encuentro nacional jornadas sobre soluciones autogestionadas de prótesis y ayudas personales. –> Proponer o buscar proyectos y personas a invitar.
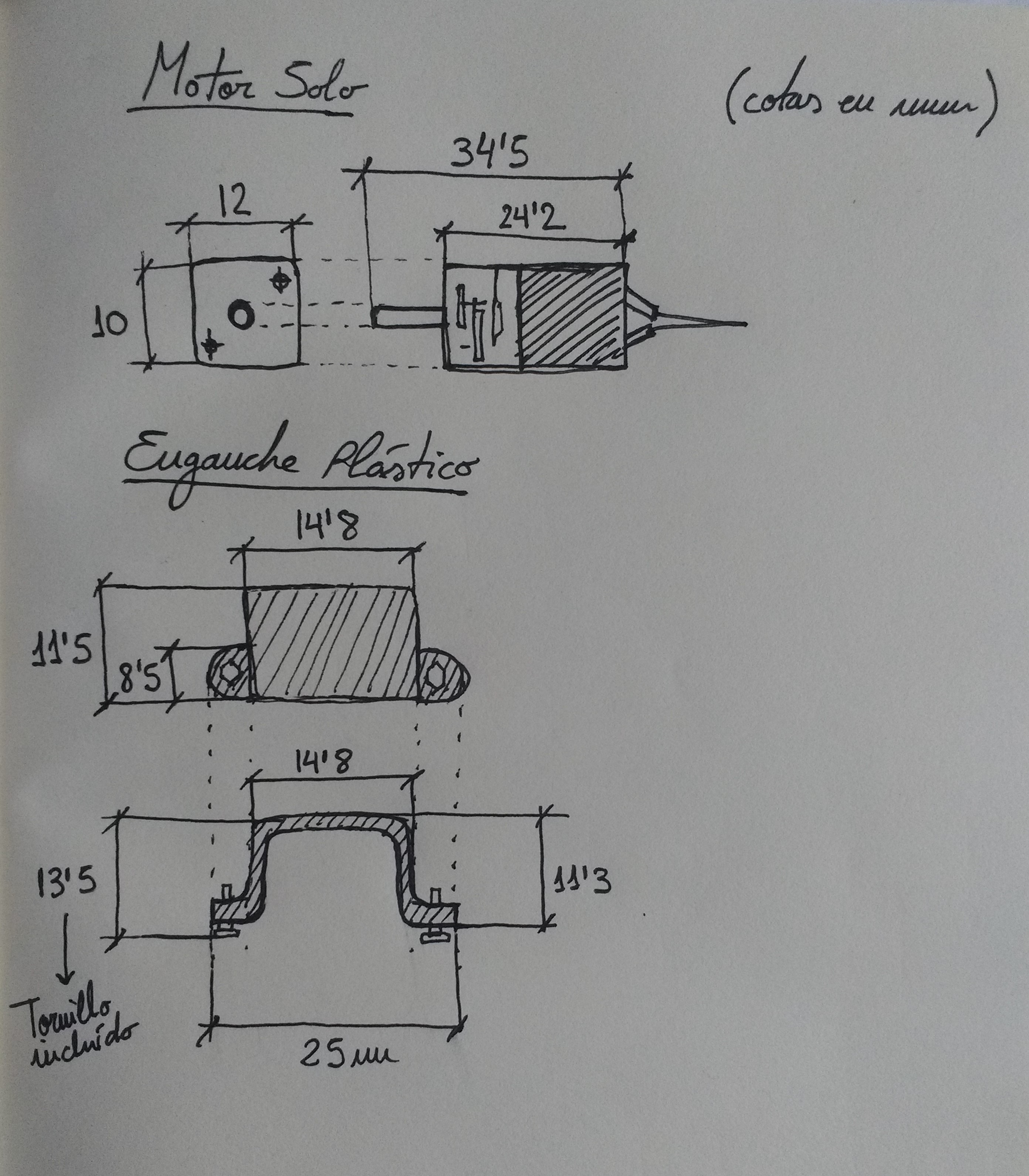
- Explicación de la idea de Manu sobre un sistema que necesita un solo motor.
- Propuesta sobre una posible participación en las jornadas anuales de AFANIP
- Pasos a seguir en el diseño respecto a las necesidades del equipo de desarrollo.

Desarrollo de la reunión:
Aunque estemos en enero, no ha sido hasta ahora cuando hemos podido retomar el tema de la encuesta. Tras aportar algunas preguntas en las reuniones anteriores de los equipos de desarrollo y diseño, hoy hemos revisado entre todos los miembros cada pregunta debatiendo la idoneidad de cada una, alcance, etc. Con todo ello y tras darle formato. ¡YA TENEMOS ENCUESTA! Hemos dado un plazo de 2 semanas para responderla y poder revisarla. Está en formato encuesta en el Drive común. Podéis enviarla a quien creáis oportuno sabiendo que son respuestas anónimas. Si da algún tipo de fallo no tenéis más que notificarlo por mail, etc.
Al hilo de los pequeños debates que habían surgido mientras se revisaba la encuesta, Fran ha propuesto una de las ideas iniciales del proyecto de investigación: jornadas de debates. Se trataría de encuentros en los que se abordan diferentes temas relacionados con el proyecto que normalmente salen en algunas reuniones o sesiones de trabajo, pero no se tratan en profundidad por la urgencia de centrarnos en el proyecto. Podríamos incluso invitar a personas (también online) que creamos que aporten algún punto de vista o nos ayude a pensar. El resto de miembros de la reunión están de acuerdo en realizarlas por lo que nos llevamos como tareas pensar temas a tratar, personas invitadas y fechas para los primeros debates.
Otra propuesta relacionada con los debates y también dentro de los objetivos iniciales de la investigación era la organización de unas jornadas a nivel nacional para tratar temas relacionados con el proyecto. Aunque sea una idea todavía en el aire, la dirección del centro le ha dado el visto bueno y han accedido a buscar la financiación necesaria para llevarla a cabo. La propuesta parte de Fran, pero quiere hacer partícipe a todo el equipo desde la formación de la temática, asistentes, formato, etc. La idea inicial es unas jornadas sobre soluciones autogestionadas de prótesis y ayudas personales. Consistiría en compartir experiencias, relatos, proyectos y formas de hacer con otros proyectos similares o afines que nos ayude a tejer un conjunto de relaciones y redes para seguir avanzando. Aún está pendiente hablar con organizaciones que celebran encuentros parecidos para coordinar temas y agendas. Desde ahora estáis completamente invitados a aportar todas las ideas que creáis oportunas.
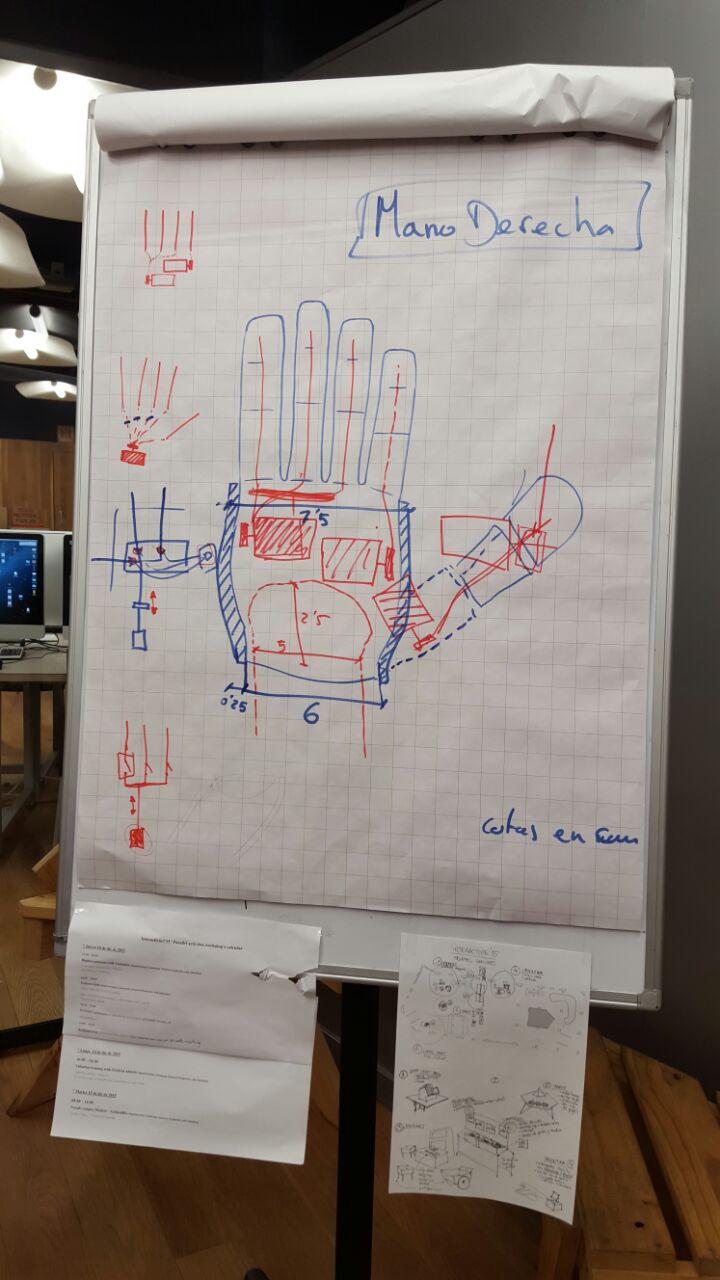
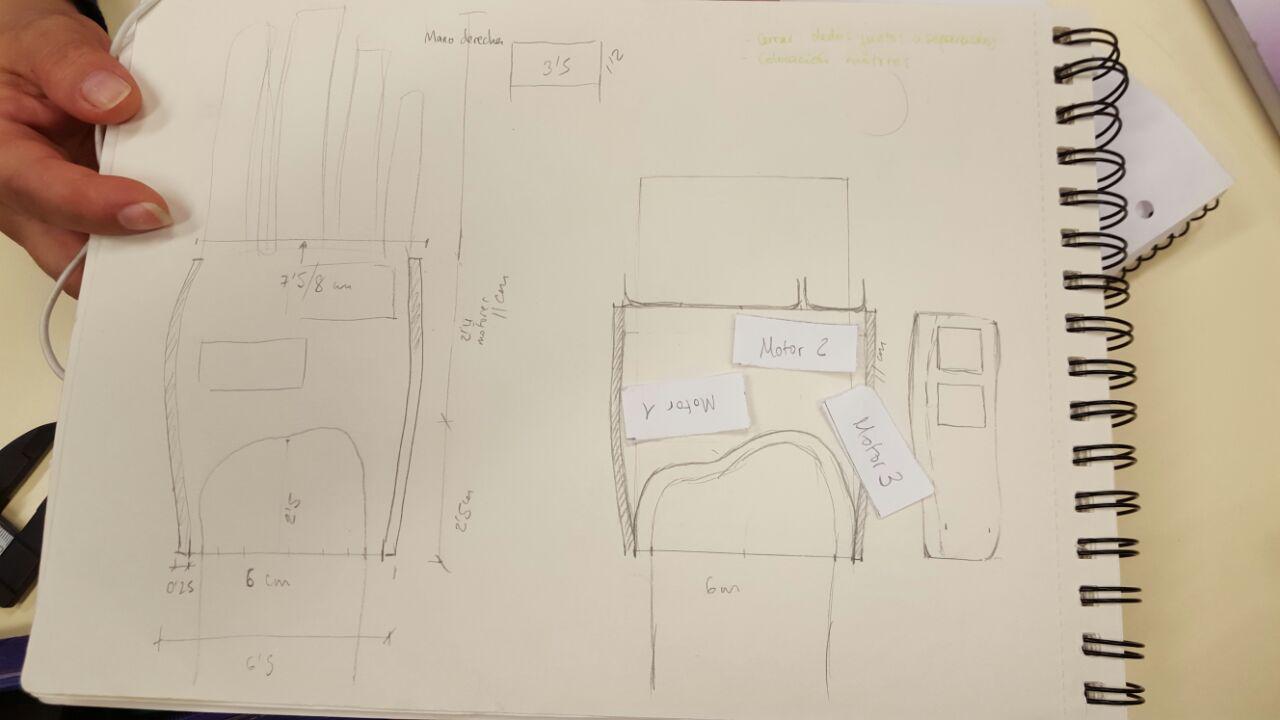
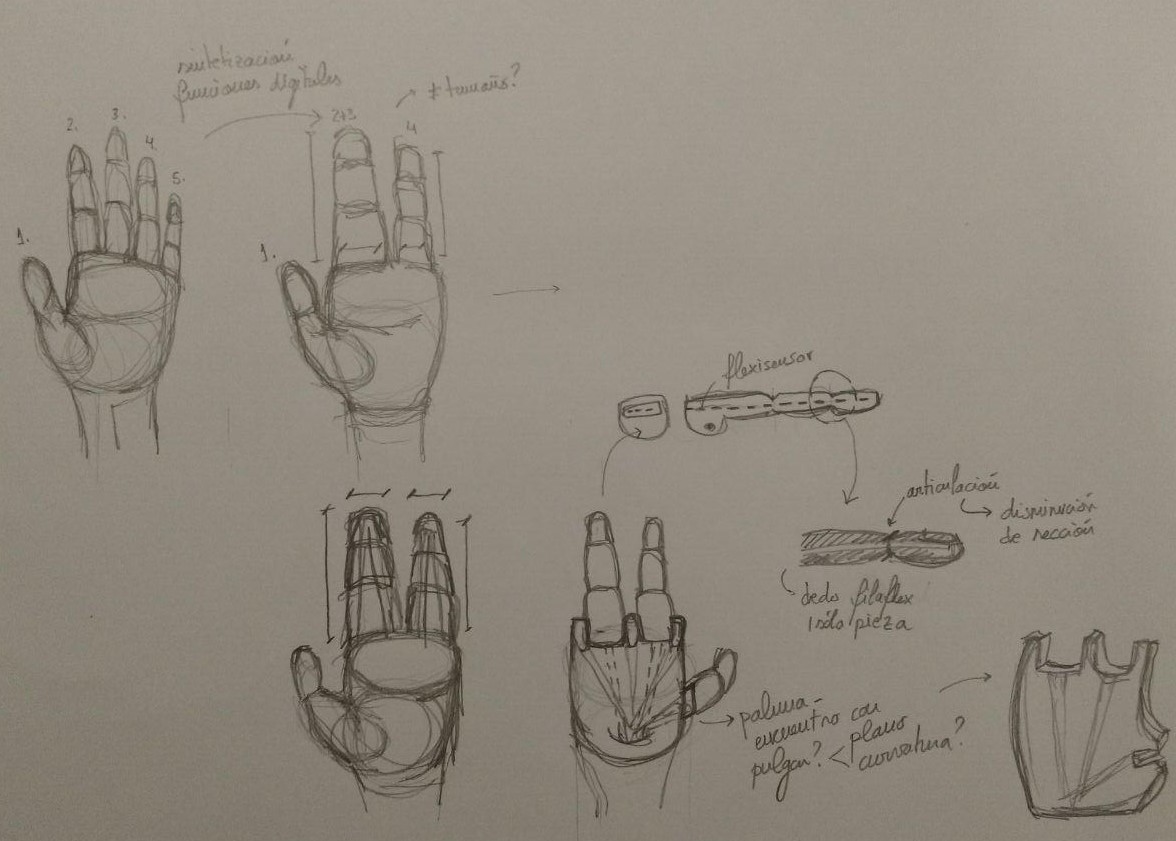
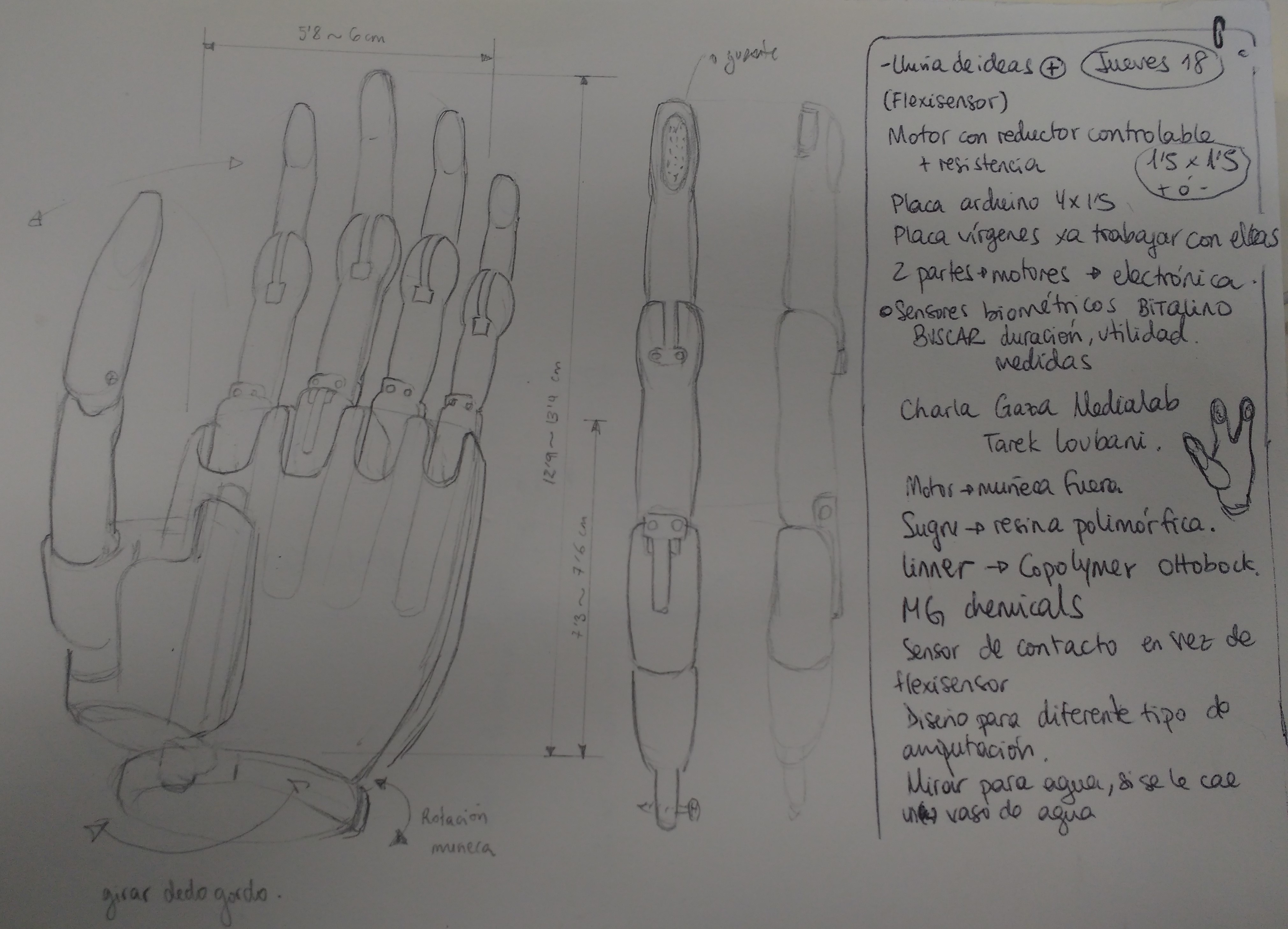
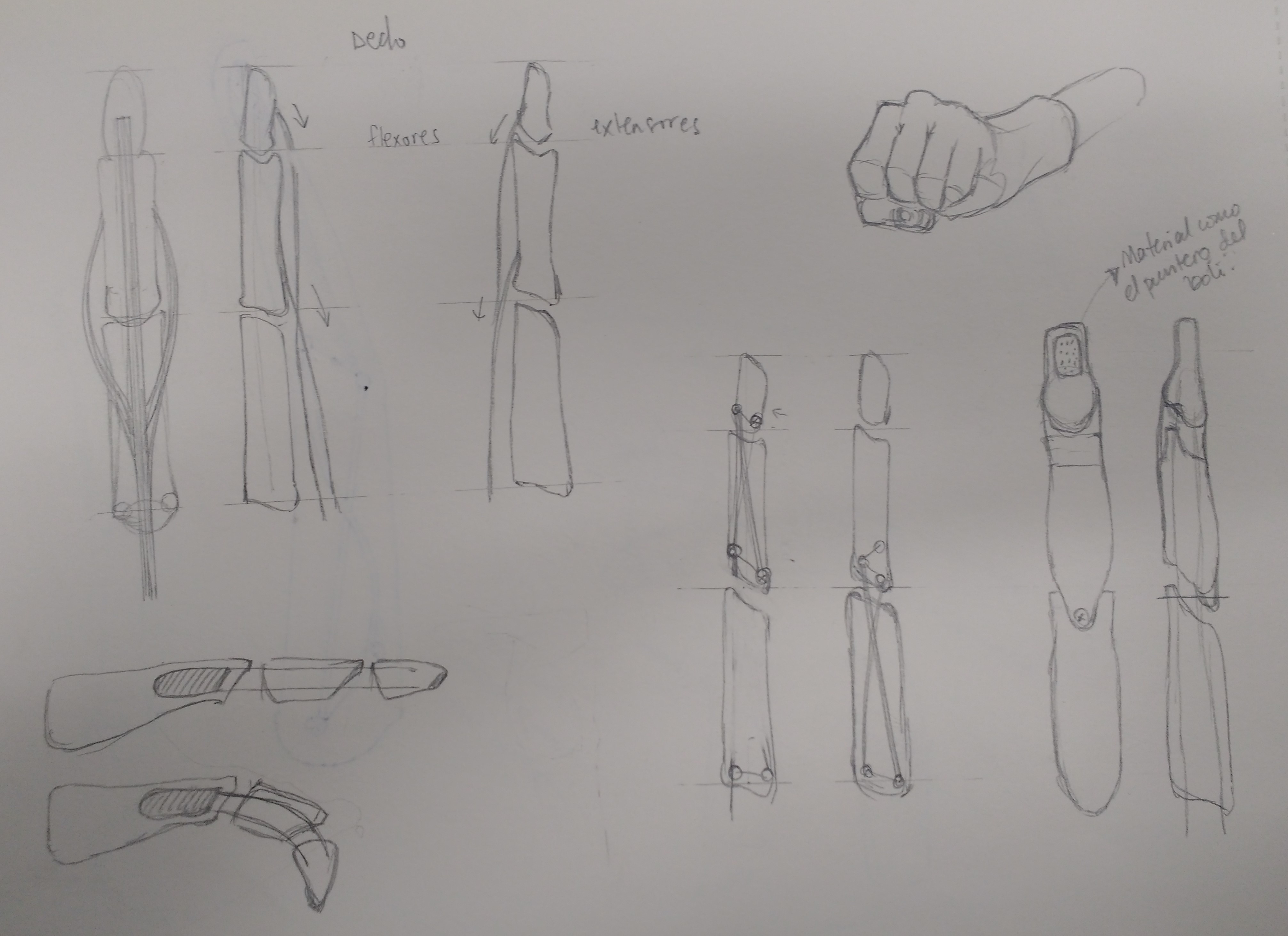
A continuación, Manuel pasa a explicarnos la idea que está pensando para intentar disminuir el mecanismo de la mano a un solo motor y otros 3 actuadores. Como ya se ha intentado explicar en otras reuniones, consistiría en un motor que tiraría de los 3 tensores del esquema de funcionamiento actual. Después habría un sistema que bloquearía el movimiento de ciertos dedos según las órdenes de los motores. Este sistema de bloqueo es el principal escollo para dar por válida esta opción por ahora, se han propuesto varias soluciones, con diversos mecanismos que estarían activados por mini actuadores magnéticos. Junto con el resto del grupo estuvimos debatiendo las diferentes posibilidades de realizarlo, buscando puntos débiles, etc. Cualquier aportación es bienvenida ya que seguiremos pensando en esta vía de desarrollo paralela a la actual de los 3 motores.
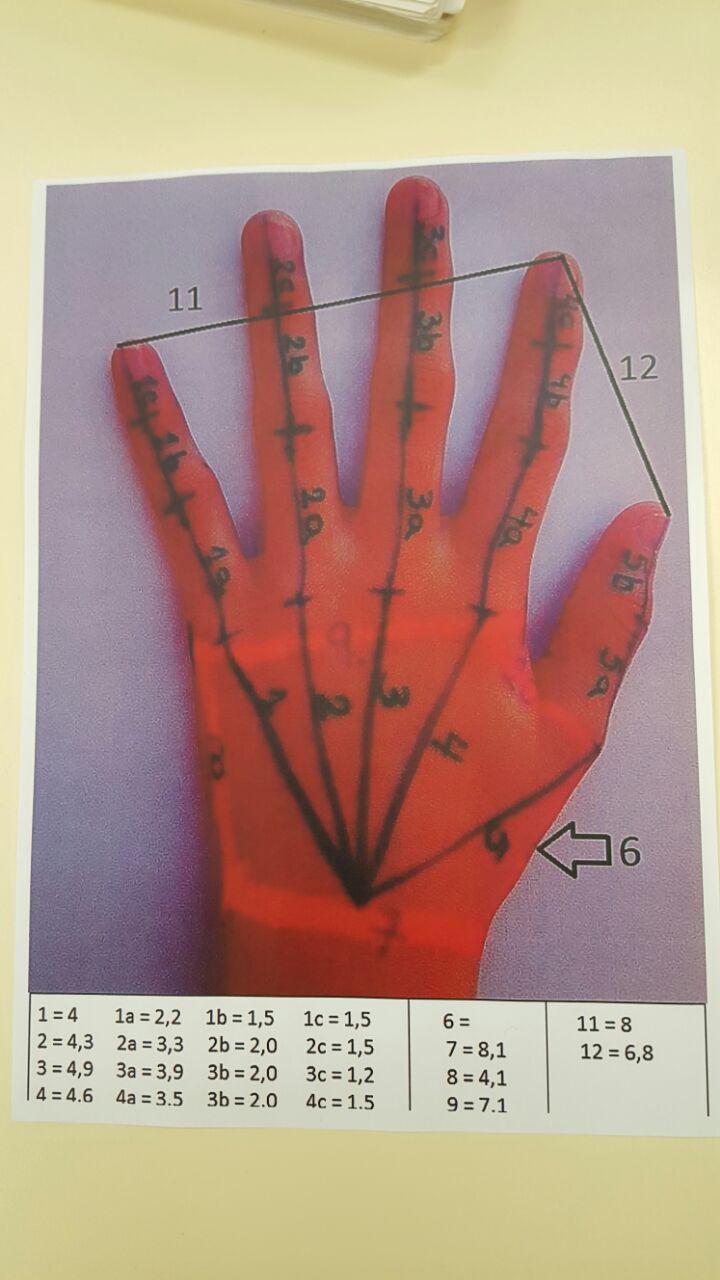
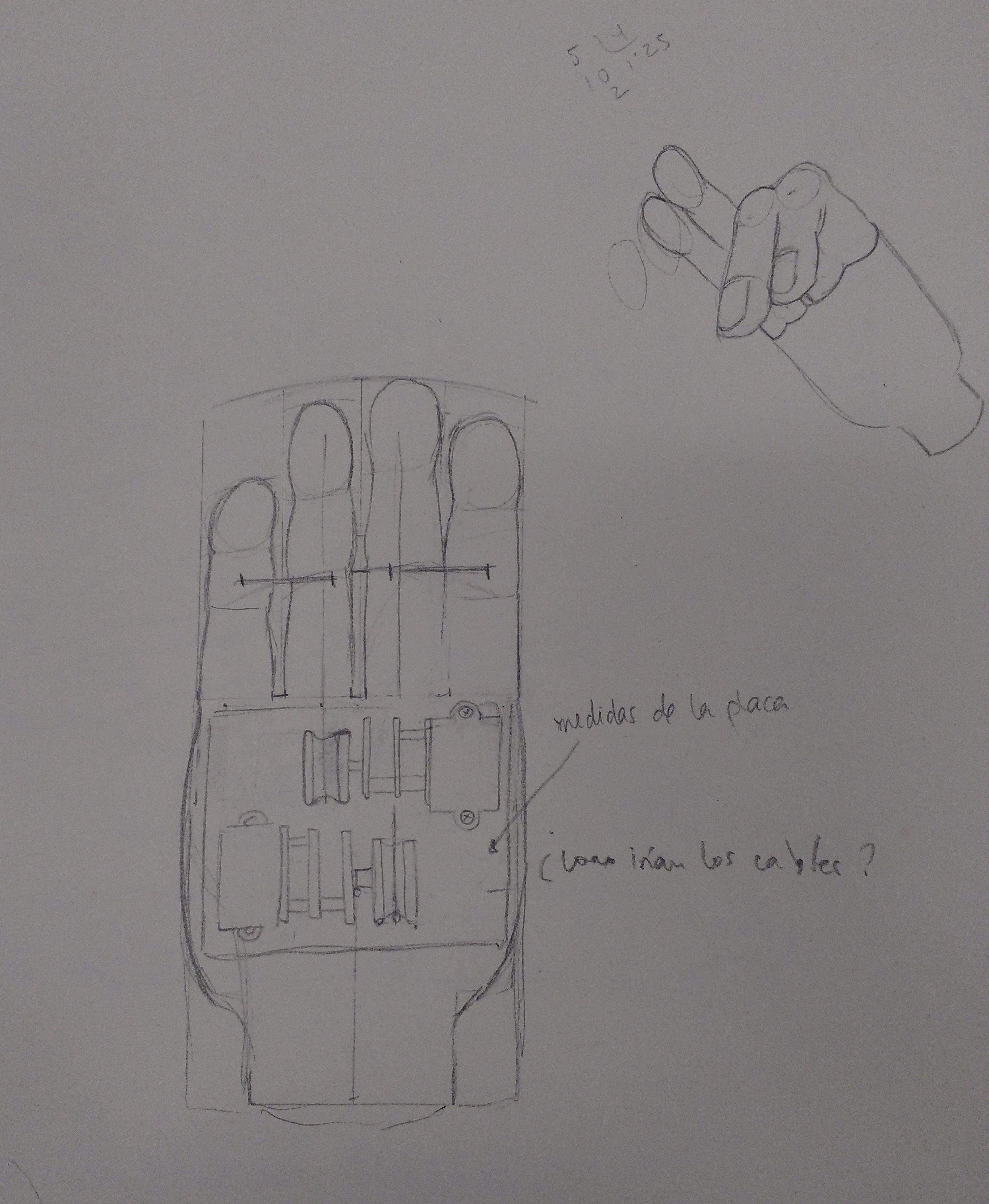
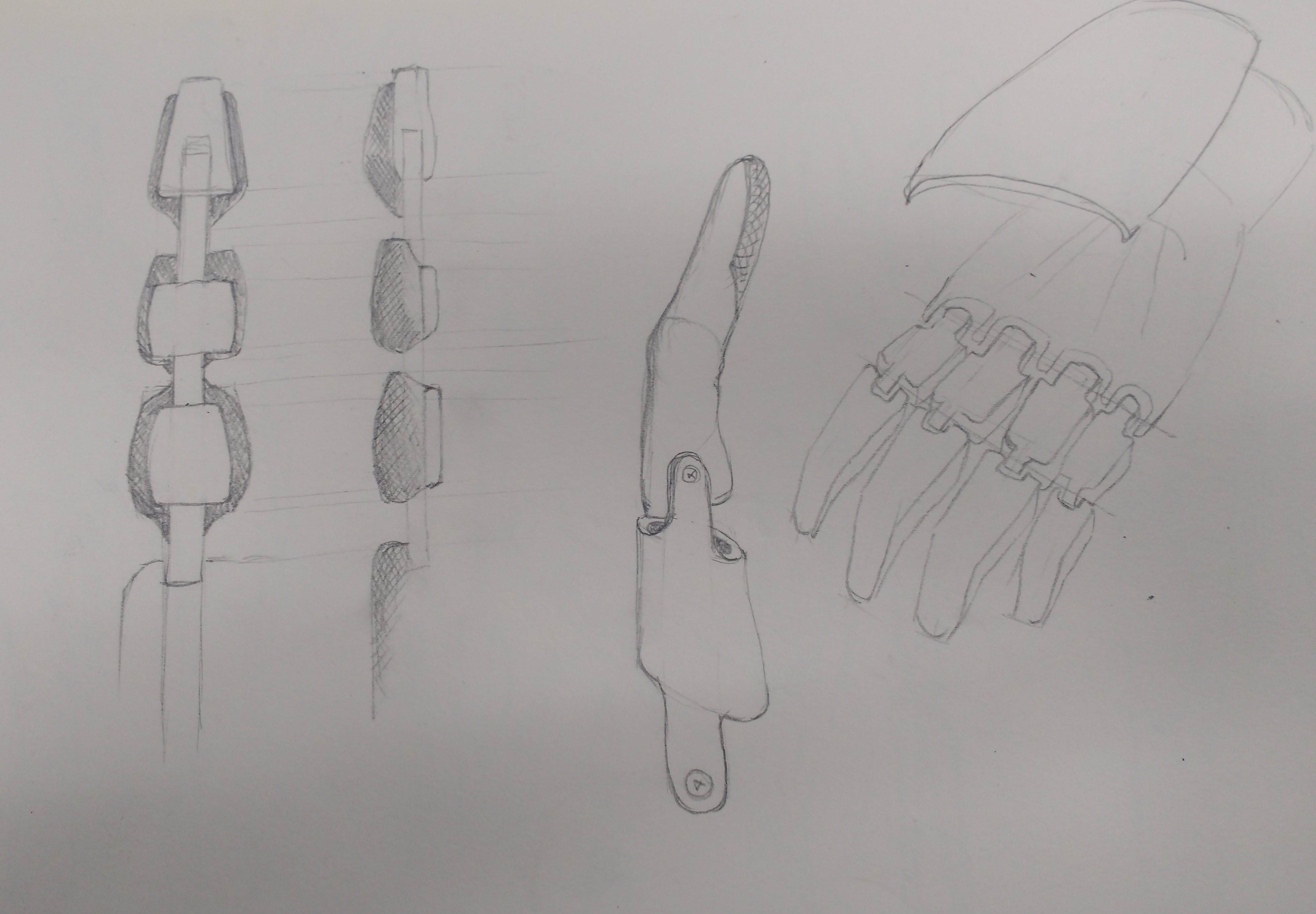
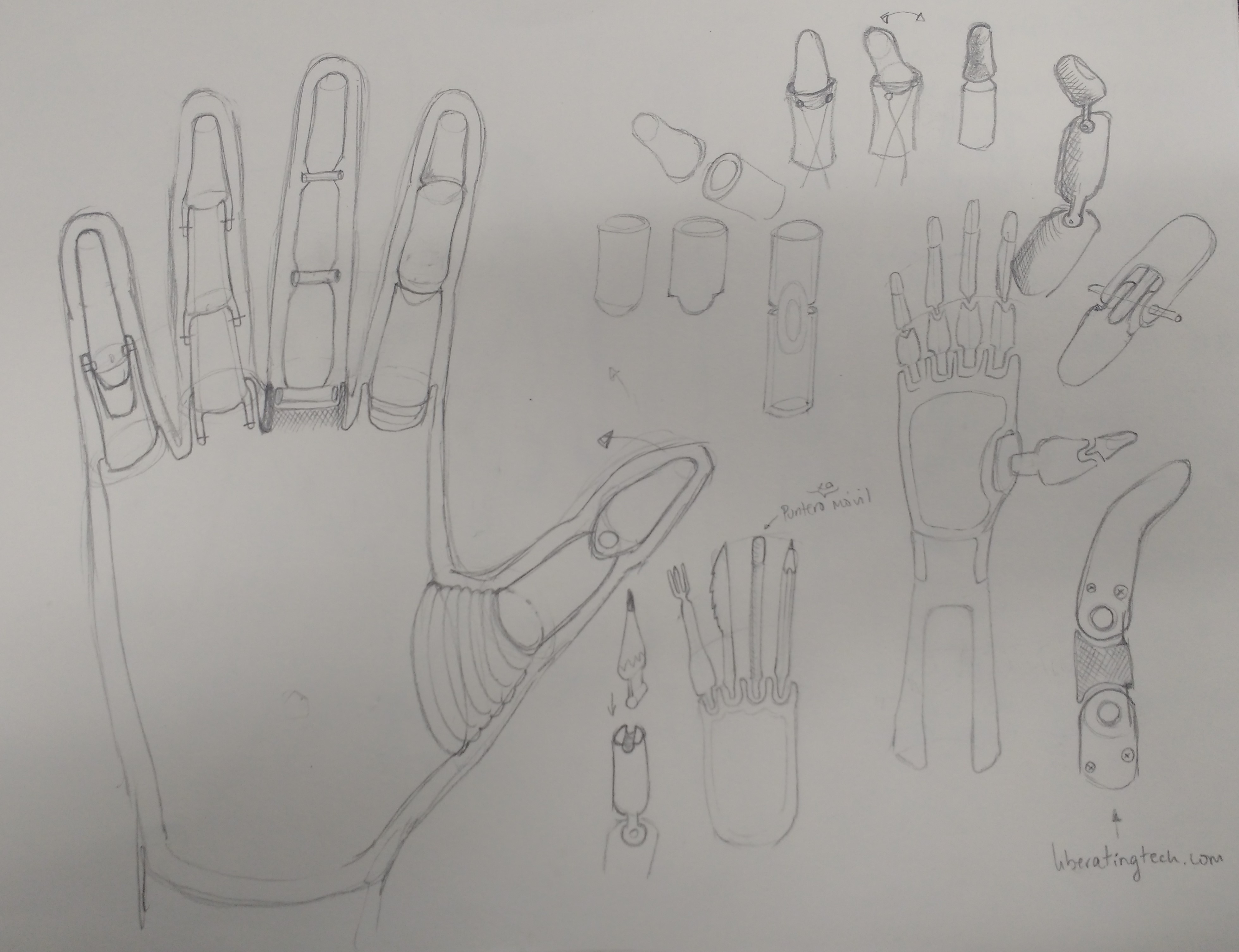
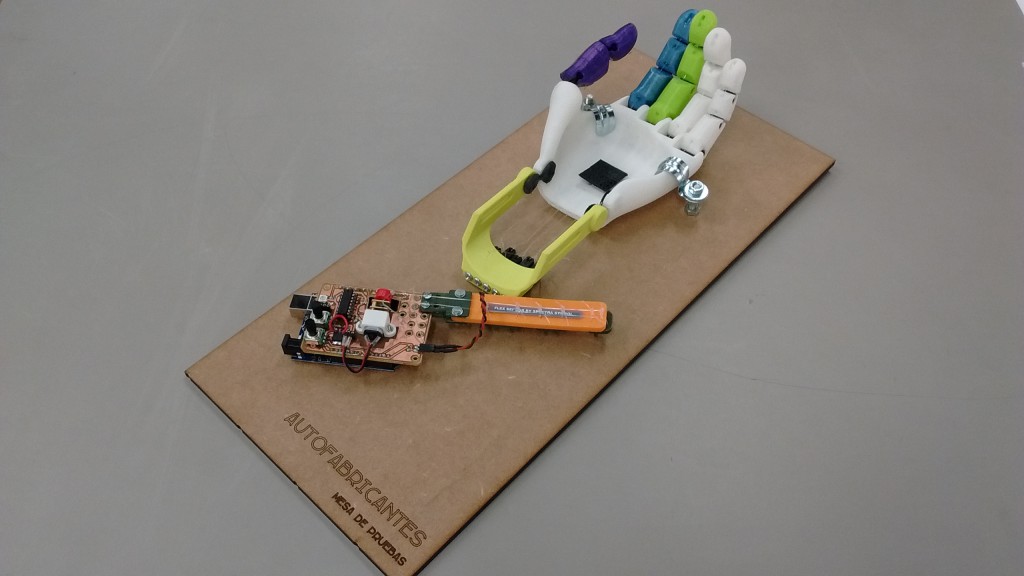
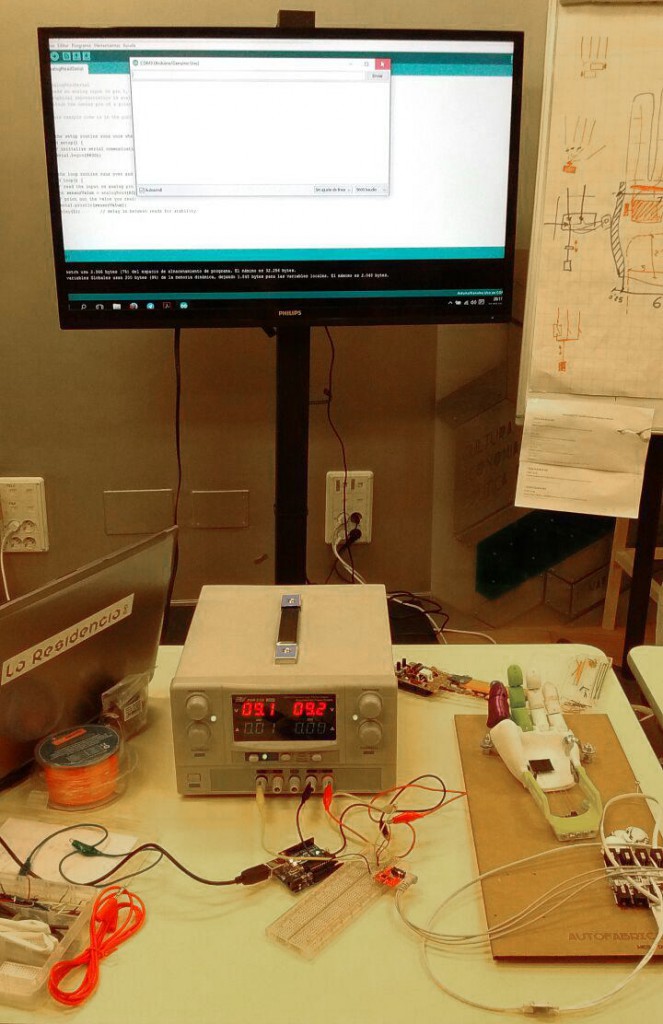
Tras este intenso debate sobre el sistema de movimiento, revisamos el tema de los sensores y pasamos a hablar brevemente sobre los pasos a seguir en diseño. Desde desarrollo se ha pedido que tengamos una mano, aunque sea provisional para testear los tres motores incrustados. Decidimos entre los que estábamos presentes, incluidos varios del equipo de diseño, que es preferible trabajar sobre un modelo más definitivo, aunque Rafa va a poderse a diseñar un modelo previo que sirva. De todas maneras, si no da tiempo, con la mano que ya tenemos, podemos anclarle los motores a la tabla para poder testearlos.
Para finalizar la reunión, Manu nos comenta que están comenzando a preparar el encuentro nacional de la asociación AFANIP. Este año se realizará en el centro de Madrid y como en otras ocasiones van a invitar a diversos ponentes. Manu nos propone que si tenemos interés en contar el proyecto en este foro. Entre todos debatimos la idoneidad de estar presente en este espacio sin que hubiese un consenso completo, la opinión mayoritaria era que podría ser positivo.
Sin más, convocamos la siguiente reunión para el lunes 8 de enero a las 18:00 ya que tras la votación se han quedado los mismos días de quedada ya establecidos. Para las reuniones de equipos de trabajo hemos decidido no fijarlas para esta semana y esperar a tener en diseño un modelo previo sobre el que trabajar o incluso imprimir antes de la próxima sesión de trabajo de desarrollo a final de la semana que viene, los días 4 o 5.
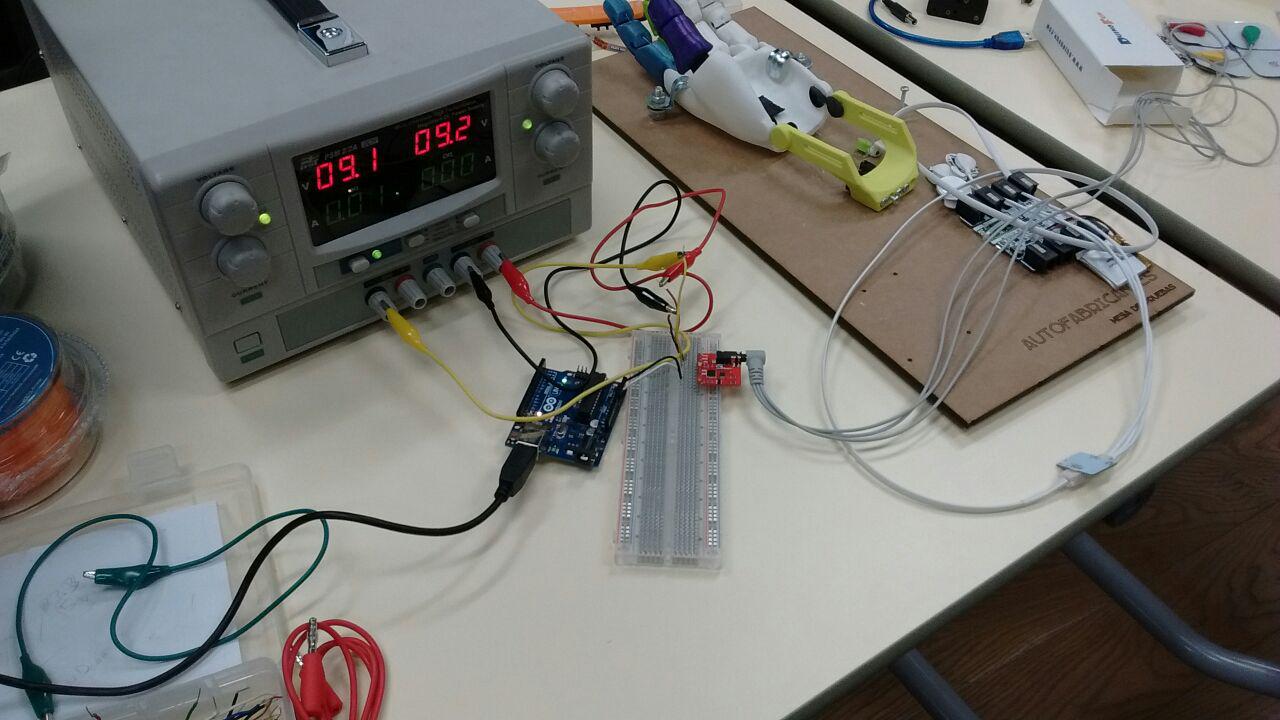 Seguimos analizando la información que nos ha mandado Manuel para poder testear los sensores de Myoware que nos está prestando Nacho. Aquí todo:
Seguimos analizando la información que nos ha mandado Manuel para poder testear los sensores de Myoware que nos está prestando Nacho. Aquí todo: