Generación de proyectos y comunidades de soporte
Educación y espacios de fabricación.
En un espacio inusual para las reuniones de Autofabricantes, el minilab, más recogido y silencioso, van tomando asiento los últimos asistentes mientras comenzamos la conexión con Carlos Lizarbe. Hoy es un día un tanto especial por tratarse del inicio de unas jornadas que hemos querido hacer desde el inicio del proyecto. Los primeros debates sobre autogestión de asistencias personales. Un espacio de reflexión, debate y encuentro que nos permita pararnos a pensar y conectar con otros proyectos, otras maneras de hacer, otras perspectivas de iniciativas similares o complementarios y otras personas con unas trayectorias que nos aporten otros puntos de vista.

La primera de estas conexiones es con uno de los mayores referentes en impresión 3D de prótesis mecánicas, Carlos Lizarbe y su alumno Iván. Ellos representan el proyecto Ikaslab que se desarrolla en el IEFPS Don Bosco de Errentería. En un laboratorio dentro de este instituto imprimen sonrisas como ellos mismos dicen, haciendo y desarrollando prótesis con impresión 3D. Constituyen un nodo estable de la red internacional Enable y comenzaron con una petición de prótesis desde México, actualmente están más centrado en los entornos cercanos e invierten parte de su esfuerzo en el diseño y adaptación de mejores prototipos.
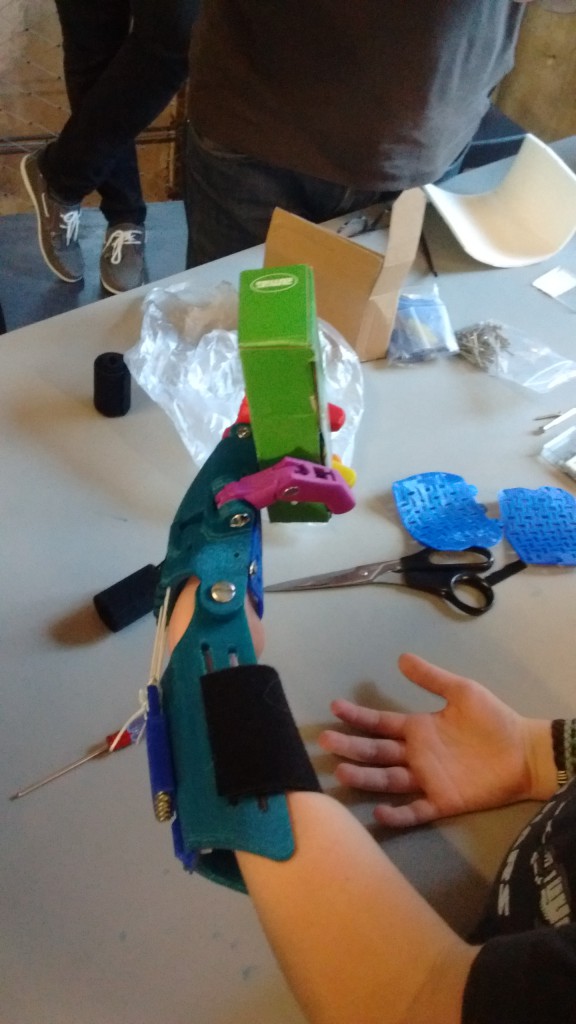
Carlos e Iván nos cuentas sus inicios con esta primera prótesis trabajada desde la distancia y con modelos 3D del muñón del chico mejicano. Pronto les llegó el reto de Unai que requería de otro tipo de mecánica para poder mover la pinza de la mano. Partieron del modelo Rit Arm (V.2) de Enable y del Flexihand para mezclarlos y adaptarlos a las necesidades de Unai. Tuvieron que superar varias dificultades técnicas y la modificación de los primeros prototipos por la debilidad de la conexión de los tensores del codo, además de probar diferentes plásticos para mejorar la resistencia. En todo este relato pudimos compartir opiniones y experiencias con el equipo de diseño de Autofabricantes que participaba del encuentro. Dificultades técnicas que nos hemos encontrado en puntos similares, cómo se han resuelto las complejidades de ciertas partes del diseño. Con sorpresa, también aprendimos las diferencias entre imprimir en el clima cantábrico y en el centro de la península 0_0.
Hubo tiempo para que nos hablaran sobre su organización y gestión, a diferencia de lo que pueda parecer, todo este esfuerzo y tiempo no forma parte de su currículo académico y horas de clase, los chicos se reúnen por las tardes de manera desinteresada. Es un espacio de aprendizaje de toda la parte técnica y de diseño que realizan, pero lo más importante es aprender a colaborar, a trabajar en grupo y el valor humano de un proyecto de estas características. La relación y afectos con las familias y los niños con los que trabajan es lo que más valoran y les gusta, poner en funcionamiento una prótesis y comprobar con los niños que les funciona para ciertas actividades diarias es lo más gratificante para ellos.
La evolución a medio y largo plazo del proyecto también fue un tema de debate pues aquí también tenemos dudas e incertidumbres similares. A nivel de centros educativos, el año que viene van a intentar desarrollar estos mismos grupos de trabajo en otros centros de formación profesional. Todos estos centros están en una red que alojaría los diferentes nodos, de este modo se podrían dosificar los esfuerzos y tiempos empleados por los alumnos a la vez que se complementarían las capacidades de los chicos de cada centro. La fórmula consistiría en gestionar a través del foro de Ikaslabs las propuestas y proyectos que vayan llegando, coordinarse y colaborar entre ellos. Existen incertidumbres sobre su funcionamiento por las responsabilidades de cada uno, el tiempo y recursos de los que disponen, etc. La mejor manera será empezar a probar.
En un nivel más de redes superiores e intercambio de conocimientos y recursos en código abierto, tanto Carlos e Ivan como los presentes en la sala coincidíamos en que Thingiverse no es el mejor espacio para compartir los diseños por la cantidad de objetos que existen y la dificultad de seguimiento de las versiones y mejoras. Por otro lado, Enable está muy bien, pero en los últimos meses se ha vuelto un poco más difícil su funcionamiento. Tras un debate sobre cómo debemos compartir la información y hacerla accesible, surgió un encargo o propuesta para el debate de la sesión siguiente: un foro o lugar de debate virtual en el que se pueda hablar de manera más exclusiva sobre fabricación de asistencias técnicas personales autogestionadas. Llegamos a la conclusión que es necesario un espacio web de referencia sobre este tipo de proyectos que permita un buen seguimiento de las versiones, buena accesibilidad hacia los proyectos, fácil comunicación con y entre las familias, etc. En la actualidad existen muchas iniciativas parecidas en el territorio nacional e internacional que se dispersan en pequeñas soluciones personales sin llegar a una comunidad más amplia. Aglutinar y coordinar un espacio común de intercambio y ayuda mutua será largo y complejo, pero estuvimos de acuerdo en que debe ser el objetivo. Además, coincidimos en la creación no solo de un espacio común virtual sino en la creación de una red de intercambio y cooperación de iniciativas similares.
Con muy buena sensación y una buena dosis de aprendizaje despedimos a Carlos e Iván sabiendo que volveríamos a encontrarnos pronto. Como en todo debate, hemos empezado a resolver algunas de las dudas iniciales con las que veníamos y hemos empezado a plantear muchas más. Seguiremos avanzando, debatiendo y aprendiendo por el camino. Muchas gracias a todos los asistentes y en especial a Carlos Lizarbe e Iván por su tiempo y trabajo. ¡Nos vemos!