Comenzamos la reunión general en la que tenemos varias novedades principales a tratar además de poner en común los avances de los diferentes equipos de trabajo. Están también tres nuevos compañeros de grupo, Christian, Álvaro y Alma que se suman al proyecto.
Resumen, los temas principales tratados han sido:
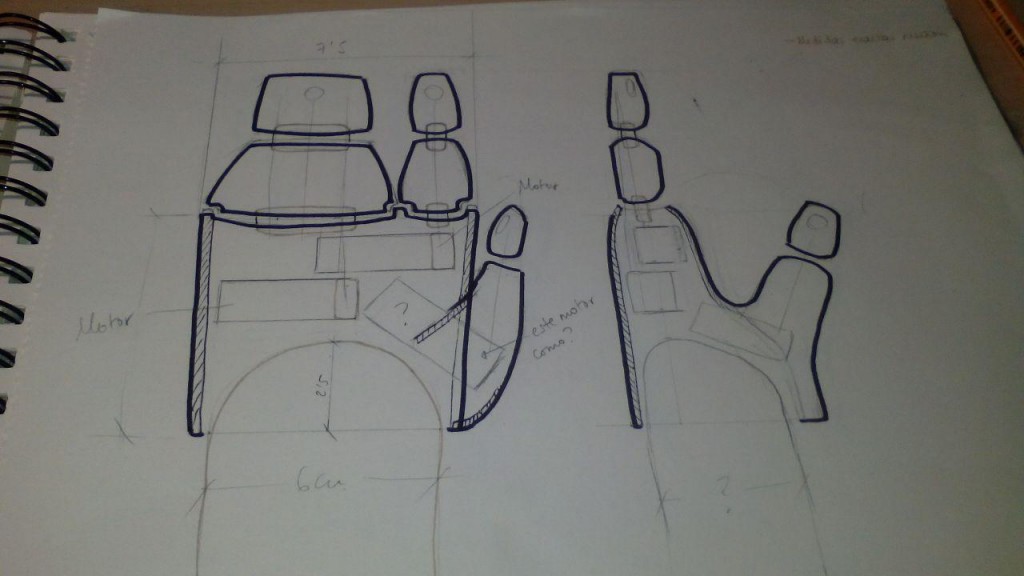
- Debate sobre la posición de los motores
- Sistema de movimiento del pulgar
- Debate del tipo de motores
- Aportación de Christian con su trabajo fin de grado
- Estudiar tipo de sensor hall
- Activar el foro
- Fijar temas de debates y fechas

Desarrollo de la reunión:
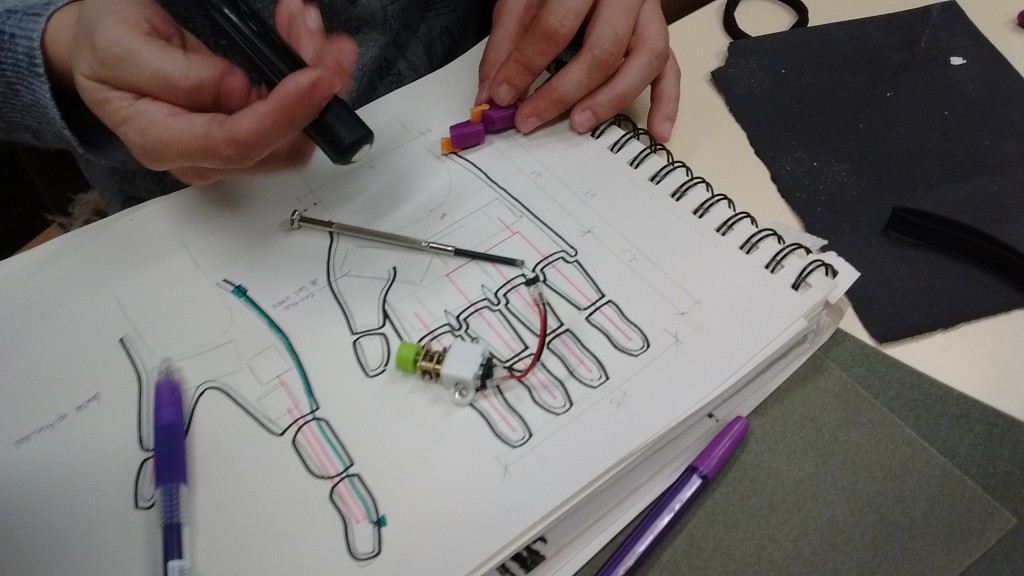
Gran parte de la reunión transcurrió debatiendo cómo colocar los 3 motores en la palma, pues con la impresión del primer diseño hemos podido comprobar que no caben los 3 motores. Las modificaciones que tenemos que hacer en el diseño tienen que tener en cuenta:
- Alinear mejor las cabezas de los motores y la entrada de los tensores por los conductos de la palma.
- Comprobando el poco espacio del que disponemos, vimos la posibilidad de colocar uno de los motores encima del otro.
- El sistema de agarre de los motores hay que sustituirlo por la propia estructura de la mano porque ocupa mucho espacio.
- Un sistema de guías o algo así para conducir bien los tensores de los tres dedos que van juntos.
- Rediseñar el dedo anular para que haga bien su función de pinza. Según las recomendaciones de Christian por su experiencia, hay que articular la base del dedo también o colocar el dedo más inclinado hacia el centro de la mano.
El compañero Christian nos habló un poco de la investigación en su Trabajo Final de Grado que nos ha dejado disponible en el Drive. Es muy interesante lo que presenta respecto al funcionamiento de algunas partes del diseño y las pruebas físicas a las que somete a los materiales. Esto nos servirá mucho a la hora de imprimir, seleccionar materiales y mejorar los diseños.
Respecto al movimiento del pulgar se debatió largo rato sobre la posibilidad de moverlo desde la base con un tipo de engranaje epicicloidal o planetario, pero por ahora se ha decidido resolver a través del diseño.
Respecto a los motores y la búsqueda de otros más pequeños, se buscaron unos nano-servos pero que no sabemos exactamente si tienen fuerza suficiente y por ahora vamos a probar con los que tenemos. Por otro lado, Pablo ha comentado que tiene unos pequeños motores (más que los de revolución) para añadir más movimientos que quiere probar y traerá el próximo día. Aunque no puedo asistir a la reunión, Silvia nos mandó estos esquemas y documentos sobre los diferentes tipos de movimientos de los dedos o posiciones de los motores.
Con los sensores de control de los dedos, seguimos investigando, los de efecto hall hay que testear los que tenemos, su posición óptima, tipo de imán a colocar, etc. Este libro recomendado por Silvia nos indica parámetros de uso, etc. También se apuntó la posibilidad de control de los motores analizando el propio consumo de los motores.
Por último, apuntamos la propuesta de la última reunión para establecer una serie de encuentros de debates puntuales para tratar los temas que van saliendo en las reuniones. Al hilo de esto, también visitamos el foro del blog en el que vamos a intentar canalizar algunas cuestiones a debatir que ya han salido en las reuniones anteriores o iniciar otros.
Respecto a las tareas de cada parte, lo importante ahora está en el equipo de desarrollo para montar en una protoboard un sistema de interacción de los motores y los sensores. Pablo tiene uno par de sensores iguales que los que se han pedido y esperemos que traigan pronto. En la parte de diseño, tenemos que seguir mejorando el diseño para introducir los cambios apuntados.
Hay que apuntar que, durante toda la sesión, las compañeras Karina y Mónica sobre todo se esforzaron en montar los deditos impresos para este nuevo modelo 😉