La sesión de este lunes está también bastante animada y tenemos algunas tareas que cerrar hoy y otros temas a debatir y decidir.
Diseño:
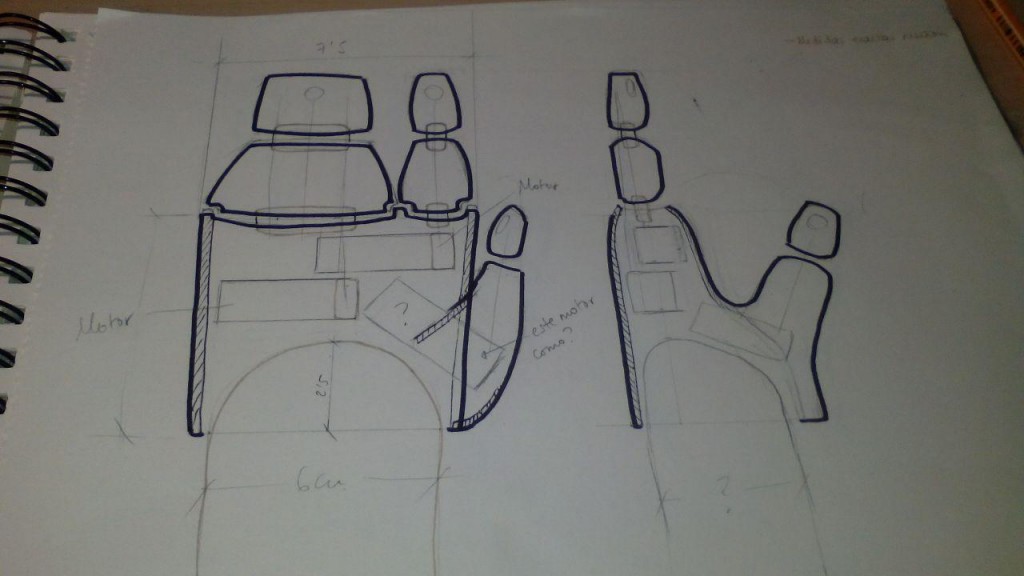
- Proyecto Leo: Luis ha impreso el nuevo antebrazo con las modificaciones que habíamos apuntado. Faltan imprimir los dedos y ya podremos montar el nuevo modelo para probar.
- Proyecto Rafa-Jaime: Luis trae el cierre botones impreso en varios materiales, el flexible parece que es el que mejor funciona. El tope interior de la pieza hembra del anclaje hay que hacerlo más grande para que funcione, es demasiado pequeño y en el laminador de la impresora apenas se queda en nada.
Desarrollo:
- Sensores: Clara ha hecho una investigación sobre otros sensores y proyectos para evaluar qué otras opciones tenemos. Las conclusiones generales son:
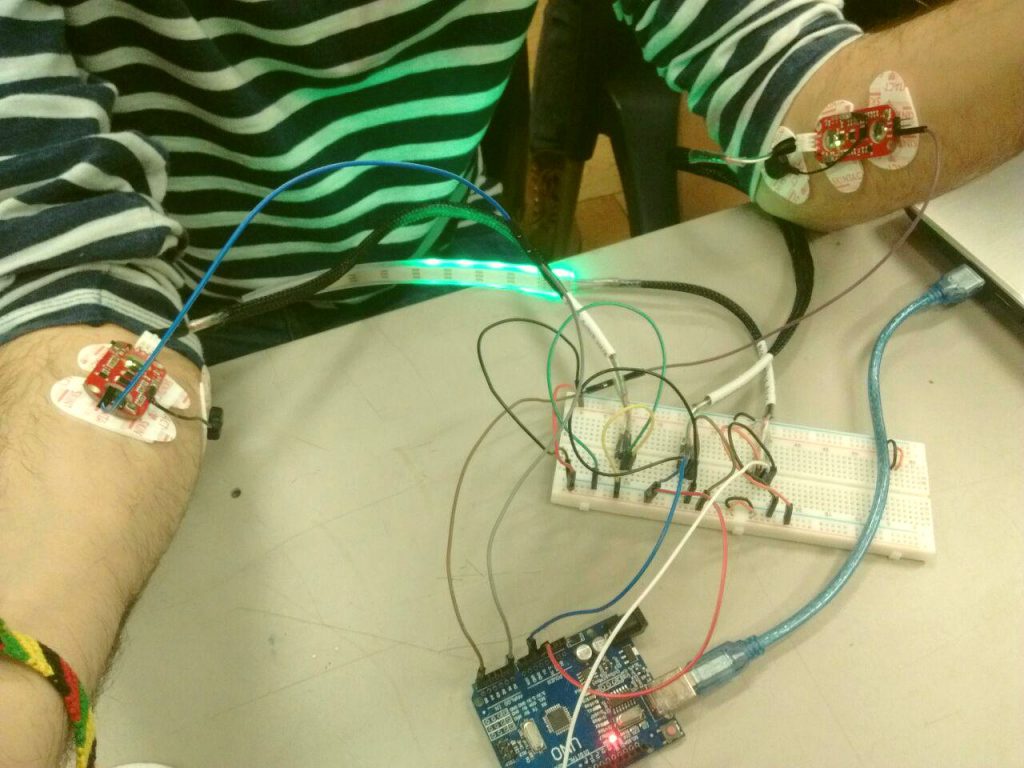
- Muchos proyectos parecidos al nuestro utilizan los Myoware.
- En código abierto hay muy pocos tiempos de sensores y fabricantes, la mayoría de bajo coste.
- En la gama de sensores privativos hay mucho para elegir pero con un rango de costes muy caros. Además todos utilizan softwares específicos con los que sería difícil integrar nuestra programación.
Estas son algunas referencias que ha investigado Clara, el próximo día podemos debatirlas y pedir más información a las que consideremos:
- OpenBCI: están sobredimensionados para nosotros, se usa con un software definido para ellos y una placa de control que también tamaño?
$1000 → http://shop.openbci.com/collections/frontpage/products/openbci-16-channel-r-d-kit?variant=785215991
- BTS Bioengineering: no dicen nada del precio, parece que nos encajará bastante bien imagino que para saber más habrá que contactar no dice nada de que se pueda obtener la información del sensor sin su software
http://www.btsbioengineering.com/products/surface-emg/bts-freeemg/
- DELSYS: modelos Bagnori y Tringo. Software específicamente creado para el sensor
http://www.delsys.com/products/desktop-emg/surface-emg-sensors/
- Grove: compatible con arduino $48
https://www.seeedstudio.com/Grove-EMG-Detector-p-1737.html?gclid=CJbZ-JjU-9ECFWcq0wod1M4IGw#
- NexGen: no dicen nada del precio, imagino que para saber más habrá que contactar no dice nada de que se pueda obtener la información del sensor sin su software.
http://www.nexgenergo.com/ergonomics/biodataemg.html
- Myon: no dicen nada del precio imagino que para saber más habrá que contactar no dice nada de que se pueda obtener la información del sensor sin su software. http://www.myon.ch/aktos
Durante la sesión también debatimos sobre la posibilidad de trabajar con otros tipos de sensores: infrarrojo, de voz, etc. En este punto vemos que estamos muy atascados y hay que decidir qué camino tomar. Una de los detalles que se apuntan es que a partir de ahora debemos de guardar todos los datos en crudo de las lecturas que hacemos para poder analizarlos a posteriormente. Así podremos ver dónde estamos fallando. También puede ayudar una grabación simultánea del movimiento del brazo. En general, ser más sistemáticos y escrupulosos en las pruebas para minimizar errores.
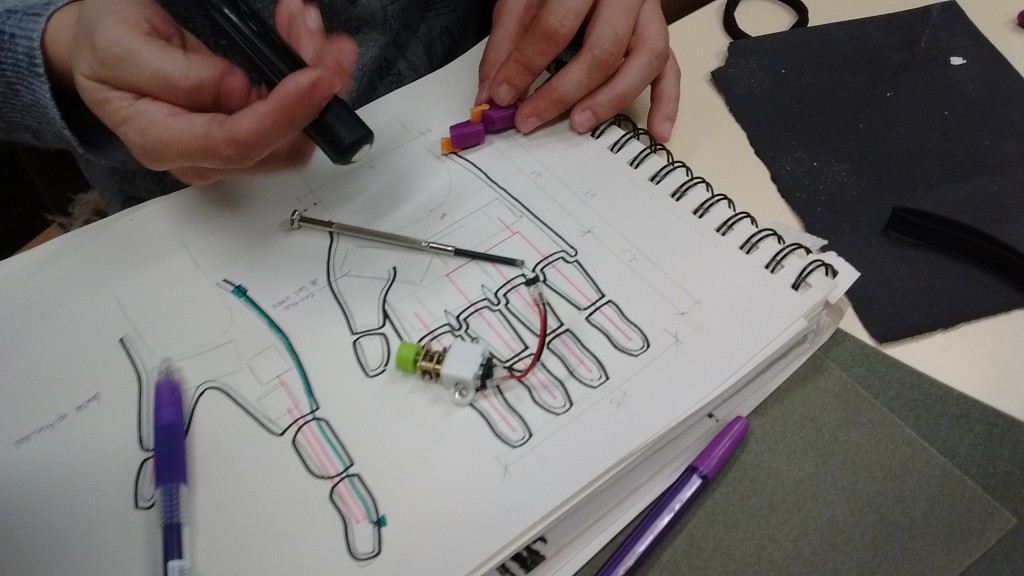
- Motores: Pablo y Luis han hecho un nuevo enganche entre el motor y el potenciómetro moldeando el eje del motor hasta que engarce con el hueco del eje del potenciómetro. Un trabajo minucioso que nos permite ganar unos 4mm.

Miguel nos cuenta las conclusiones de la investigación que ha hecho sobre los motores. También nos detalla cómo funciona cada tipo de motor para que entendamos bien las conclusiones. Una clase express sobre motores resumida a continuación: Básicamente hay tres tipos de motores DC, Servos y Stepers.
- Los motores stepers o paso a paso no nos sirven pues funcionan con movimientos de ángulos muy amplios.
- Los servos nos dan más velocidad pero poco movimiento (par). Lo normal es que tengan un par alto y que no se quemen.
- Los motores DC no tienen control de posición, rotan mientras tengan corriente. Por ello se les añade encoders. Esta es la vía en la que estamos trabajando actualmente.
Pololu ofrece varios tipos de encordes, ópticos, magnéticos y mecánicos. Los dos primeros dan problemas pues nos dicen la posición del motor, no la del eje. Para el tipo de movimiento y precisión que necesitamos, esta posición no nos vale. El encoder tiene que estar en el eje, tal como lo tenemos ahora puesto con el potenciómetro. (Estamos en lo correcto!!! ). El magnético tiene un problema con las ondas exteriores y tienen que estar muy aislados, no nos valen. Los ópticos tampoco son fiables. Los mecánicos son los más fiables, es lo que ahora hace el potenciómetro. Tendríamos que buscar un encoder mecánico que venga montado de fábrica para el tamaño que estamos trabajando.
Otra opción es ponerlo en el tensor pero se puede romper y no lo sabíamos. Además habría que contar con la deformación de las piezas y tensores.
Por otro lado, Miguel nos apunta que tenemos que estudiar la posibilidad de añadir un sistema integrado de control de fuerza para los dedos. Esto es un limitador de corriente en la propia placa. Están el hueco previsto y se puede añadir.
- Código: Rosa ha empezado con la integración del código en la placa nueva, no está completo pero por ahora va bien.

 Avances en Desarrollo:
Avances en Desarrollo: