Con una programación diferente y muchas ganas, el pasado 1 de abril celebramos la reunión extraordinaria de Autofabricantes en mitad del curso 15/16. Tuvimos invitados especiales y algunos nuevos miembros del grupo.

La programación de toda la tarde fue:
- Primera prueba y colocación de la prótesis mecánica de Héctor.
- Taller de manejo de sensor, Arduino y servomotor por parte de Pablo.
- Visita de la familia de Exando una Mano
- Reunión general
Resumen, los temas principales y conclusiones tratados en la reunión general:
- En el equipo de Diseño se necesita un refuerzo.
- Investigación en nuevos materiales de impresión y diseños por parte de Luis
- Consejos de mejora del diseño de los dedos por parte de Christian
- Revisión estado de la fase de Desarrollo, vamos a diseñar y encargar una placa
- Decidimos fijar al menos UNA REUNIÓN DE CADA EQUIPO A LA SEMANA.
- Decidimos dejar las reuniones generales sólo una vez al mes y cuando veamos necesario. Serán los últimos viernes o días cercanos a final de mes: Próxima jueves 28 de abril (el viernes es Viernes Open Lab y estáis invitados al evento).
Desarrollo de la reunión general:
La tarde comenzó con la llegada de Natalia, Paula, Juan y Martín, la familia promotora del proyecto Exando una Mano que tenían muchas ganas de conocer el equipo y todo lo que estamos avanzando en Medialab. Fue muy bonito intercambiar opiniones e ilusiones por un proyecto común en un momento en el que el nodo de Sevilla se encuentra con menos impulso.
A ellos y seguramente a todos los asistentes nos emocionó bastante uno de los momentos importantes de la tarde, la prueba de la prótesis de Héctor. Después de ser adaptada para su tamaño e impresa con los colores que él quería, pudo probarla por primera vez. Al inicio con un poco de timidez, pero pronto vimos cómo con un poco de práctica es capaz de agarrar casi cualquier cosa. Todo, gracias al gran trabajo del equipo de diseño y más en concreto a Luis. Ya nos ha contado cómo ha ido probándola en los días posteriores y está muy contento de pequeños grandes pasos que va dando con ella. Ahora el objetivo es revisar los fallos y mejoras que haya detectado para seguir avanzando en su usabilidad.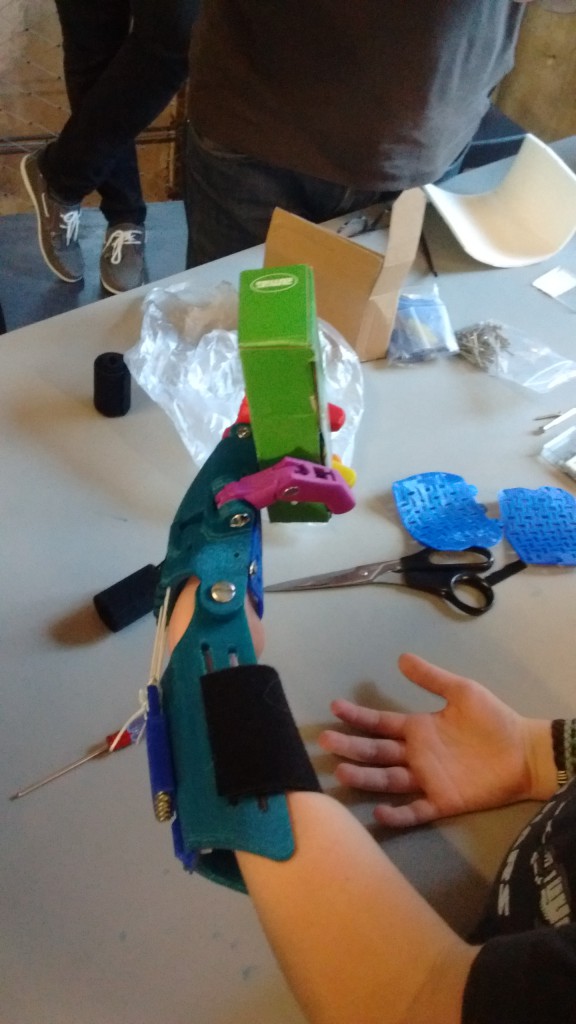
Mientras estábamos con Héctor, por otro lado, Pablo estaba dando un taller a parte de los asistentes a la reunión sobre cómo comenzar a manejar un motor con un miosensor y un Arduino. Previamente se había trabajado un fantástico tutorial con todas las especificaciones y explicaciones más extensas. Además, por si os lo perdisteis, tenemos un audio del trascurso del taller. Cada pequeño grupo que se formó pudo aprender gracias a unos kits que se trajo de su universidad y con el material que ya tenemos del proyecto.
Para acabar la jornada y con más asistentes de lo habitual, empezamos una reunión general que se alargó hasta las 10 de la noche. En primer lugar, como coordinador del proyecto quise remarcar y volver a dar las gracias por tantas y tantas horas, trabajo, esfuerzo e ilusión que estáis dando en este proyecto que sería imposible sin vosotros. Una vez más, gracias por las más de 25 reuniones, más de 100 horas de impresión, más de 20 referencias estudiadas, 2 diseños propios desarrollados, 1 prototipo de Enable impreso y entregado, 3 tipos de motores probados, 2 tipos de sensores testeados, tantas líneas de código y, sobre todo, la ilusión.
Hicimos un repaso por los objetivos iniciales del proyecto y los hitos conseguidos hasta el momento. A continuación, comenzamos a detallar los retos que aún quedan por conseguir.
- Diseño: la forma y material de los dedos aún no está clara y en eso se centró parte del debate sobre cómo avanzar en el diseño. La parte de la palma está más clara pues parece que tenemos hueco suficiente para los motores y en la parte de antebrazo no hemos empezado a trabajar lo suficiente. Con respecto a los dedos, Christian nos ayudó y explicó según todo lo investigado en su trabajo final de grado. Deben ser de un mismo material para que nos e produzcan aristas vivas y zonas de concentración de esfuerzos que causan fragilidad y rotura del dedo. Por tanto, la mejor manera de funcionamiento es con dedos todo de material flexible. En cuanto al diseño en sí de los dedos, basándonos en su estudio de reparto de esfuerzos, hay que trabajar sobre una sección de dedo que permita una transición de zonas más cargadas a menos cargadas, sin aristas vivas que concentren la fatiga del material. Es el diseño más importante que el propio material, pero la información al respecto de los dedos que existe está dispersa y sólo en formato de investigación o industrial. Para avanzar decidimos partir del diseño que tenía Christian en su TFG para mejorarlo e incorporarlo al diseño general de la mano.
Luis nos trajo un montón de pruebas de diferentes diseños de dedos y manos impresas en diferentes materiales flexibles o de nilón. Al pasarlas a escala de niño pudimos comprobar la dificultad de llevar a cabo algunos de los proyectos de referencia de manos mioeléctricas en código abierto. Además, nos sirvió de base y avance para todo el debate que tuvimos sobre el diseño de los dedos.

- Desarrollo: en este campo hemos trabajado mucho testeando diferentes tipos de motores, sensores y sistemas. Es muy difícil y complejo avanzar por la falta de referencias y dificultad de encontrar materiales accesibles para testear rápidamente. Muchos de los motores y sensores los hemos tenido que pedir a Estados Unidos y han tardado varias semanas en llegar. Los miosensores parece que son los definitivos que vamos a usar y el nuevo motor de Hitec tipo nanoservo de gear metálico parece que también será el definitivo por su torque y dimensiones. Ahora el reto es aprender a controlarlo todo. Por otra parte, Pablo está diseñando una PCB de prueba para poder probar los tres motores y tres sensores que además incorpore un conjunto de aplicaciones para el diseño final como puede ser una micro SD, botón de reset, otros sensores, etc. Ya está pedida la PCB y pronto podremos probar con ella. Mientras, ya está empezado el código de Arduino para controlar un motor con un miosensor. Por último de esta parte, ya hemos señalado la necesidad de tener una interface de entrenamiento para aprender a controlar la mano, y en ello, Juanjo ya está empezando a investigar para tenerla cuando la mano esté montada.

Hubo tiempo para pensar y debatir un poco cómo podemos mejorar en la organización, cuáles eran los fallos que habíamos tenido y cómo mejorar en general el funcionamiento del grupo.
Por un lado, se señaló la necesidad de un apoyo en el equipo de diseño 3D que ayude a seguir avanzando más rápido y poder afrontar todas las tareas. También Rafa señaló que sería conveniente que pudiese trabajar en Medialab para poder compartir en tiempo real las decisiones a la vez que está diseñando. Para ello, ya tiene un ordenador con el programa de diseño para poder trabajar aquí.
En cuanto a las carencias, de nuevo volvemos a señalar la necesidad de contar con personal del ámbito sanitario y terapeutas que nos ayuden a tomar decisiones y aconsejen en muchas de las partes del proyecto.
Para un mejor funcionamiento y viendo el nivel de trabajo y coordinación actual decidimos tener al menos una reunión semanal de cada grupo de trabajo que iremos poniendo las fechas. Para las reuniones generales, hemos visto la necesidad de ponerlas sólo un día al mes para centrarnos en el trabajo técnico y compartir lo avanzado a final de cada mes o antes si vemos que es necesario. Por tanto, las reuniones de equipo serán casi siempre martes en Desarrollo y jueves en Diseño, la próxima reunión general será el jueves 28 de Abril.
Sin más, nos despedimos hasta las próximas reuniones de equipo o hasta el 28 de abril. Seguimos avanzando, cada vez con más confianza y ganas. No dudéis en escribir con las aportaciones que creáis oportunas o contactar con las personas que creáis para que se sumen al proyecto.