La reunión del lunes 16 fue más numerosa y dinámica que otras veces, unas 14 personas!! Como noticia general, hemos considerado oportuno hacer la reunión interna el próximo lunes después de la sesión de trabajo, a las 20h.
Avances en Diseño:
- Proyecto Prótesis Mioeléctrica:
Rafa online nos informa del avance en el encaje de los motores en la palma. Es complejo y nos manda por imagen una de las opciones que está barajando. Para la próxima sesión lo podremos ver en 3D. De todos modos sigue dándole vueltas a otras opciones.
- Proyecto Jaime y Rafa
– Luis trae muchas pruebas del anclaje de los gadgets con diferentes materiales, muchos tecnológicos, para que podamos evaluar. El que más nos gusta es wilowflex.
– Pensamos y debatimos la siguiente fase del proyecto en el que integramos el sistema de anclaje en una mano más ligera y menos similar a una prótesis estándar. Fran se encarga de esa parte.
– Le vamos a añadir otro anclaje más en la parte interior de la palma.
– Por consenso y evaluando los requerimientos de materiales, esfuerzos de las pestañas del anclaje y posibles recambios, decidimos integrar en la mano la parte “hembra” del anclaje.
– En la palma pondremos también una tapa de cierre rígida como en la prótesis de Leo.
– Para el enganche de la bici decidimos que este sistema no es válido y vamos a probar con el sistema de carril del inicio.
– Decidimos que esta asistencia sea solamente escalable, no estará sujeta a escáner 3D para simplificar su replicabilidad.
 Avances en Desarrollo:
Avances en Desarrollo:
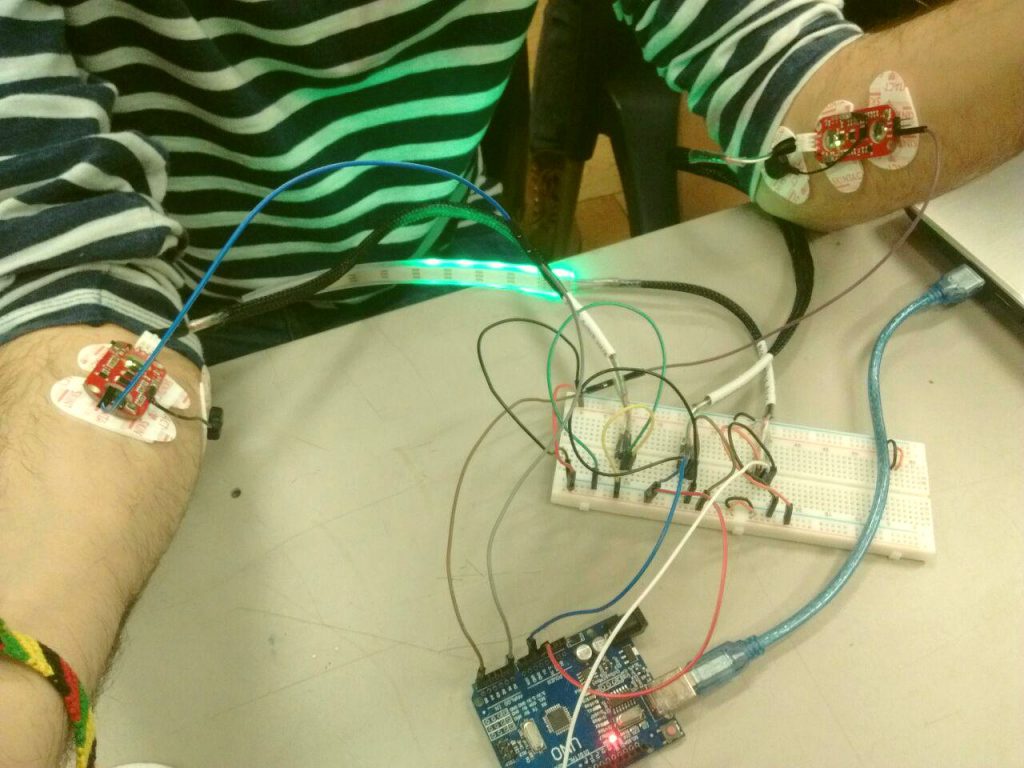
– Se han integrado los códigos de la máquina de estados y los de lecturas del sensor mioeléctrico. No dan errores.
– Comenzamos las pruebas de lecturas de dos sensores con el nuevo código. Pruebas fallidas, tras muchos intentos no conseguimos que lea los dos sensores a la vez. La semana que viene volvemos a probar pero con la placa nueva pues esta semana estábamos con un arduino y una protoboard.
– Decidimos hacer una nueva búsqueda de sensores y motores ampliando el rango de precios accesibles para obtenemos mejores resultados. Clara buscará sensores y Javi motores, en 15 días nos cuentan.
– La integración del motor en su placa con la rueda de giro y el potenciómetro no la hacemos por no tener la placa y motor ya adaptados. La sesión siguiente lo hacemos.
