Tras 15 días desde la última reunión nos volvemos a ver en el grupo general. Se incorporan al grupo dos compañeros nuevos. En el trascurso de estas dos semanas ha habido dos reuniones de los equipos de desarrollo y diseño y varias tardes de trabajo de desarrollo. Por este motivo (y probablemente en el futuro) las reuniones generales pasarán a ser tiempo de actualización y coordinación de grupos, toma de decisiones generales, etc.
Lo primero que hacemos es actualizarnos sobre las reuniones y avances de cada grupo que han sido muchos en estas dos semanas. Quizás una de las cosas más destacables de la tarde de trabajo del lunes 14 ha sido que nos han dado un nuevo kit uno de los equipos de Interactivos. Es un kit llamado Bitalino diseñado para trabajar con sensores biométricos. No ha dado tiempo a ver qué trae, de donde viene, licencias, etc. pero promete mucho y ninguno lo conocíamos. Durante esta reunión varios compañeros estuvieron buscando información y examinándolo, en las próximas reuniones nos pondrán al día y veremos si nos es útil alguno de sus componentes.
 Como encuentro importante o al menos destacado de estos días conté el que tuve con Tarek Loubani, un chico palestino que vino al Seminario Objetos Comunes para hablar sobre la dificultad de acceso a ciertos avances médicos en Gaza y cómo hacen para seguir mejorando sus vidas. Me contó un proyecto de impresión de prótesis que están llevando a cabo y las grandísimas dificultades en todos los niveles que se están encontrando. Hemos establecido contacto y ofrecido todo lo que esté en nuestra mano para ayudarles, esperemos serles de cierta utilidad en el futuro.
Como encuentro importante o al menos destacado de estos días conté el que tuve con Tarek Loubani, un chico palestino que vino al Seminario Objetos Comunes para hablar sobre la dificultad de acceso a ciertos avances médicos en Gaza y cómo hacen para seguir mejorando sus vidas. Me contó un proyecto de impresión de prótesis que están llevando a cabo y las grandísimas dificultades en todos los niveles que se están encontrando. Hemos establecido contacto y ofrecido todo lo que esté en nuestra mano para ayudarles, esperemos serles de cierta utilidad en el futuro.
El compañero Rafa nos trajo una muestra de una silicona polimórfica que utilizaban para prótesis con animales que podemos investigar su posible uso y si es aplicable en nuestro caso. También de la posibilidad de utilizar spray de silicona que hace biocompatible al ABS.
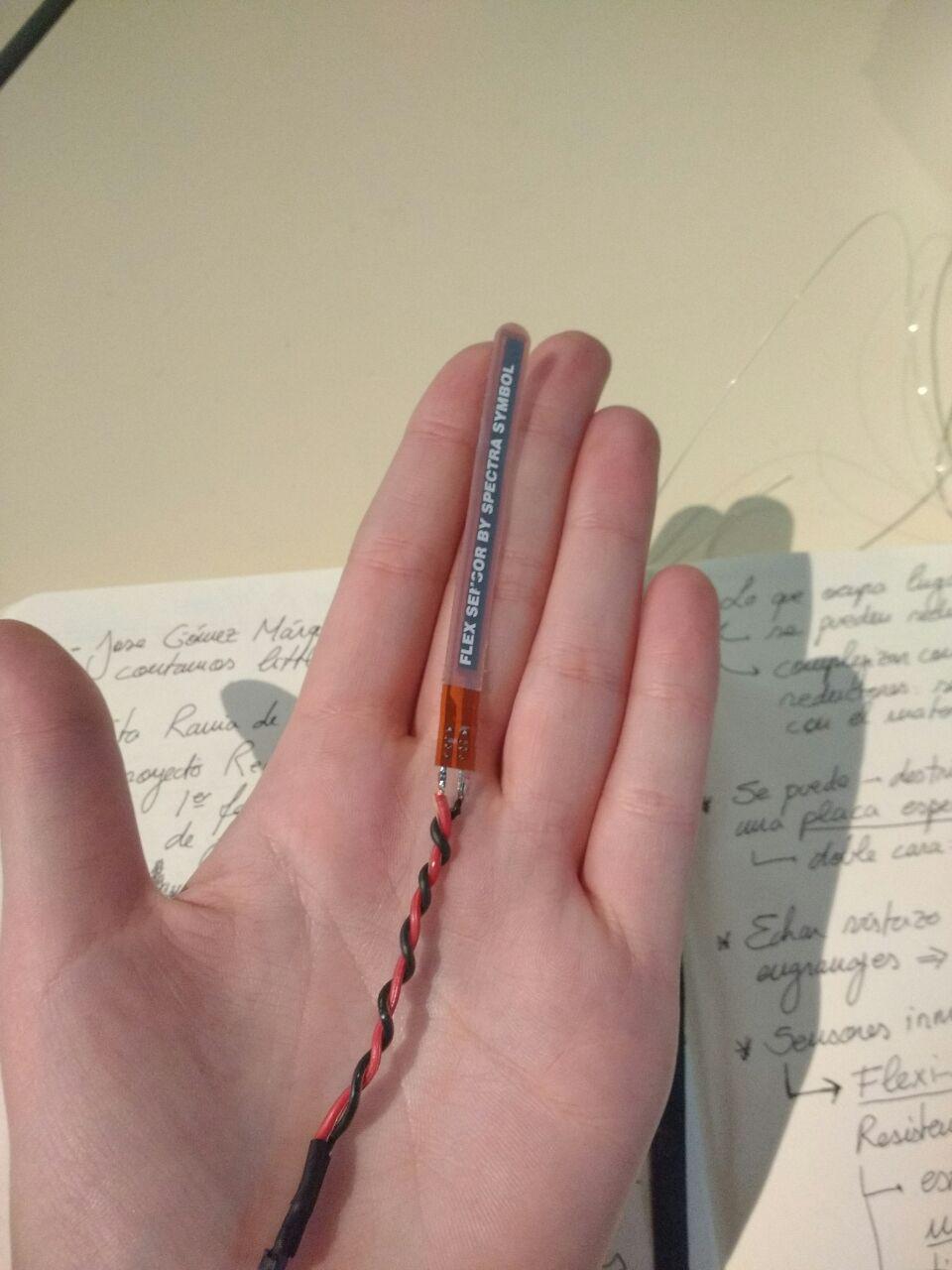
Respecto a los flexisensores que tanto nos está costando encontrar más pequeños, Clara sugirió que, si no se pueden utilizar, se puede sustituir el control que ejercían sobre los motores por unos sensores de contacto.
Por otro lado, con los sensores Myo, Manuel ha propuesto que directamente contactemos con ellos, les contemos el proyecto y “les invitemos” a que nos permitan probar sus sensores en el proyecto. Con suerte les parece bien y nos prestan uno o nos abren las librerías para poder trabajar con estos sensores.
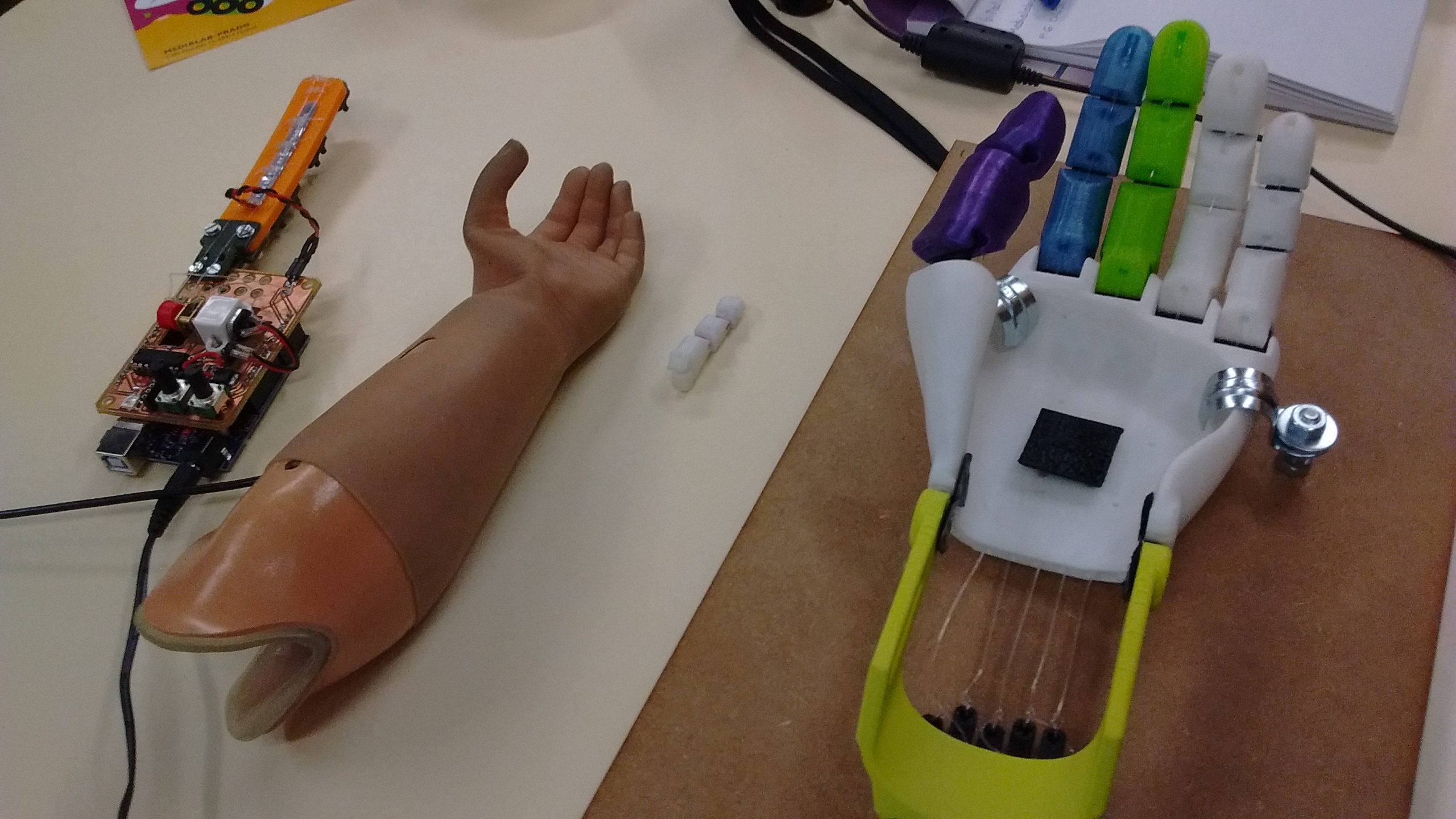
Nacho nos trajo la prótesis que actualmente usa su hija de 3 años para que comparemos y veamos qué ofrece actualmente el sistema. Creo que era una opinión general es el excesivo peso que tiene, la lentitud de los movimientos y lo rudimentario de los sensores que tiene… Seguiremos debatiendo, analizando y “aprendiendo” de esta prótesis.
 Después de todos estos apuntes entre todos los asistentes hicimos la valoración de las especificaciones que teníamos en Drive, así pudimos compartir opiniones y consensuar algunas posturas. Una de las más destacables la apuntó Manuel: no descartemos la posibilidad de que tenga movilidad en la muñeca y parte del muñoncito de la mano, la idea es hacer un modelo que permita con pocas variaciones estas dos posibilidades para no restringir en exceso las necesidades a cubrir.
Después de todos estos apuntes entre todos los asistentes hicimos la valoración de las especificaciones que teníamos en Drive, así pudimos compartir opiniones y consensuar algunas posturas. Una de las más destacables la apuntó Manuel: no descartemos la posibilidad de que tenga movilidad en la muñeca y parte del muñoncito de la mano, la idea es hacer un modelo que permita con pocas variaciones estas dos posibilidades para no restringir en exceso las necesidades a cubrir.
Como últimos apuntes, señalamos que vamos a intentar que cada equipo de trabajo sea lo más independiente posible con la toma de actas, información, etc. Por otro lado, queda pendiente realizar un pequeño cuestionario para mandar a los padres que le interese y les ayude a pensar en cómo mejorar las prótesis y las necesidades que ellos vean. Si alguien se ofrece voluntario… jeje.
Sin más, os animo a enviar, compartir o escribir en este doc todo lo que veáis respecto al proye cto. Así no caen en el olvido o se pierden. Gracias!
Nos vemos en la próxima reunión general el próximo 11 de enero de 2016!? Durante las navidades vamos a evaluar cuales son los mejores días de quedada, si los mantenemos lunes o martes o cambiamos.
Felices fiestas 😉
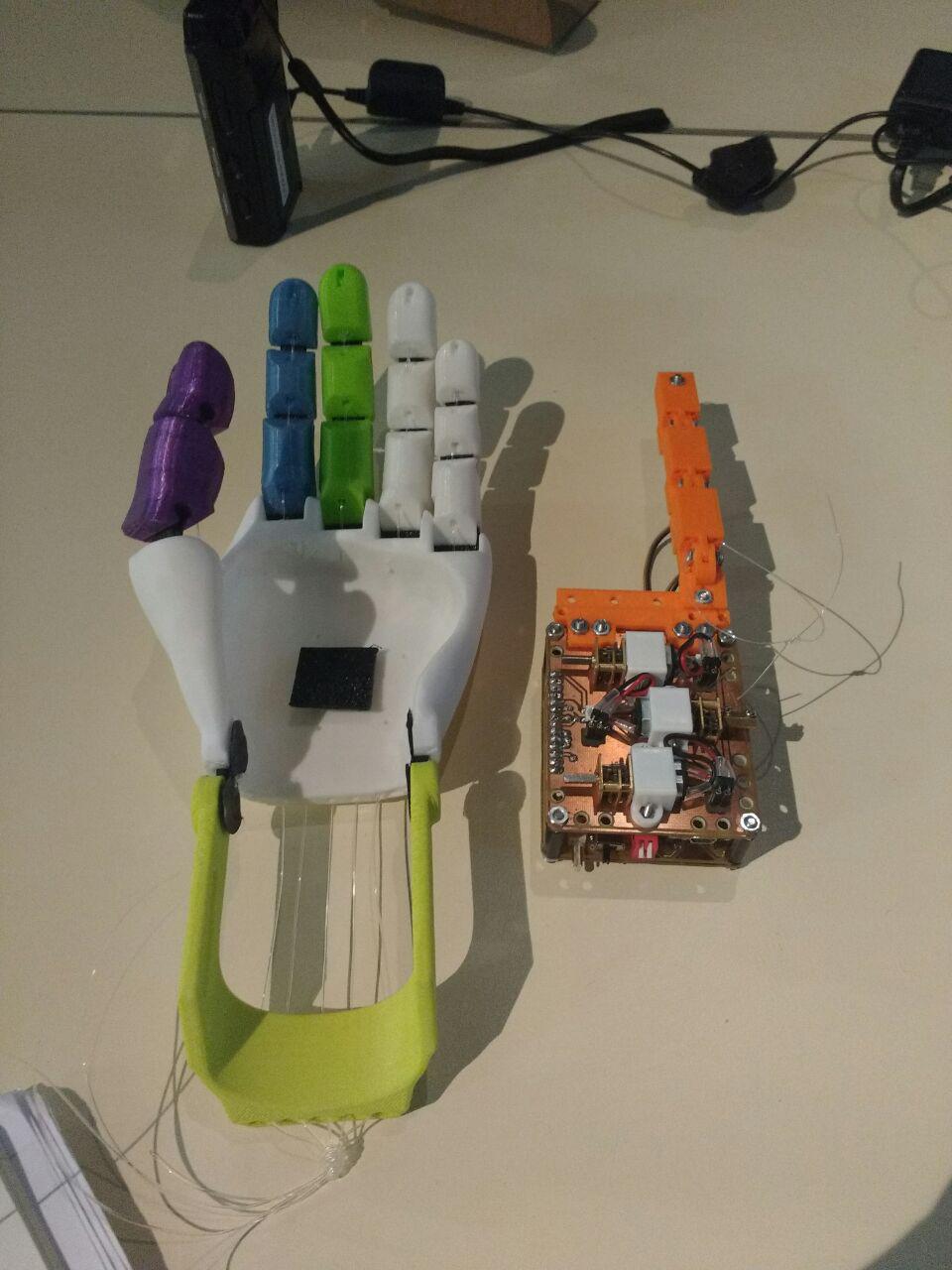
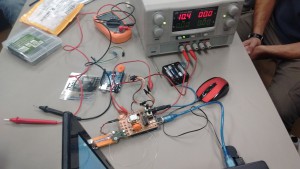 que hacemos con una fuente de pilas de 9V no tiene éxito por la fuerza que tiene que ejercer el motor para mover el dedo impreso con filaflex. Es un diseño demasiado rígido para poder trabajar con estos
que hacemos con una fuente de pilas de 9V no tiene éxito por la fuerza que tiene que ejercer el motor para mover el dedo impreso con filaflex. Es un diseño demasiado rígido para poder trabajar con estos  motores y aproximarnos a la potencia necesaria real que necesitaremos. Volvemos a probar con una fuente de alimentación regulable con 10 – 12V y si funcionan.
motores y aproximarnos a la potencia necesaria real que necesitaremos. Volvemos a probar con una fuente de alimentación regulable con 10 – 12V y si funcionan.