El lunes 30 de noviembre nos volvimos a reunir en la 4ª reunión general del grupo de trabajo, se unió al equipo el padre de Pablo que realizó aportaciones muy valiosas al grupo. En primer lugar, actualizamos al conjunto del grupo sobre la asistencia al evento del fin de semana del 21 en Bilbao, La Maker Faire en la que dimos una pequeña charla sobre el proyecto de Exando una Mano y Autofabricantes. (os remito al post sobre este evento).
Contamos brevemente la visita de Rania de Jordania el jueves después de la última reunión. Le presentamos el proyecto junto a otros proyectos de Medialab. Era un encuentro bastante breve de apenas unos minutos en el que resaltamos la necesaria conexión con otros proyectos y redes en otros países; la necesidad de cohesionarnos mejor las iniciativas de este ámbito para un intercambio de experiencias y conocimientos más fructífero. Hice referencia al proyecto de Refugees Open Ware, que está funcionando por ahora con modelos de Enable. Es un proyecto muy interesante con refugiados sirios en Jordania.
Después resumimos de la reunión del jueves 26 de noviembre del equipo de impresión 3D en la que pusimos como objetivo testear uno de los dedos al 50% de tamaño y Luis ya traía impreso con éxito.
Rodri nos presentó un conjunto de pautas de metodologías de diseño que nos pueden ayudar a pensar y definir mejor en el proyecto a todos los niveles. Ésta presentación dio pie a diversos debates e intercambios de opiniones muy interesantes. Lo más destacable es:
- Partir un conjunto de necesidades del diseño, por una encuesta u otro procedimiento.
- Hacer una valoración según las necesidades recopiladas y una lluvia de ideas sobre el diseño a realizar.
- Ponderar las soluciones aportadas según las prestaciones o el cumplimiento de las especificaciones.
- Selección de alternativas y opciones óptimas que aúnen las mejores ideas.

El primer paso tras estas indicaciones es realizar un documento con las necesidades detectadas por los padres con experiencia en prótesis.
Tras todo ello, vino genial la lista que traía Pablo sobre requisitos o limitaciones técnicas que debe incorporar la prótesis en general. Es una lista que también está en Drive y pedimos encarecidamente que se repase y se añadan más requisitos. Sobre todo, en esta fase inicial del proyecto son necesarias todas las ideas y sugerencias posibles. Repasamos y aprobamos cada uno de los puntos que estaban ya apuntados añadiendo detalles, etc. Quedó como tarea que todos añadamos más y alguien se encargue de generar un sistema de votación para valorar las especificaciones más necesarias y su prioridad.
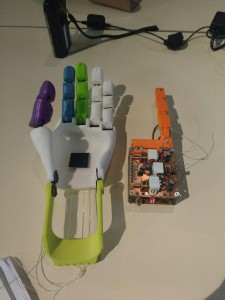
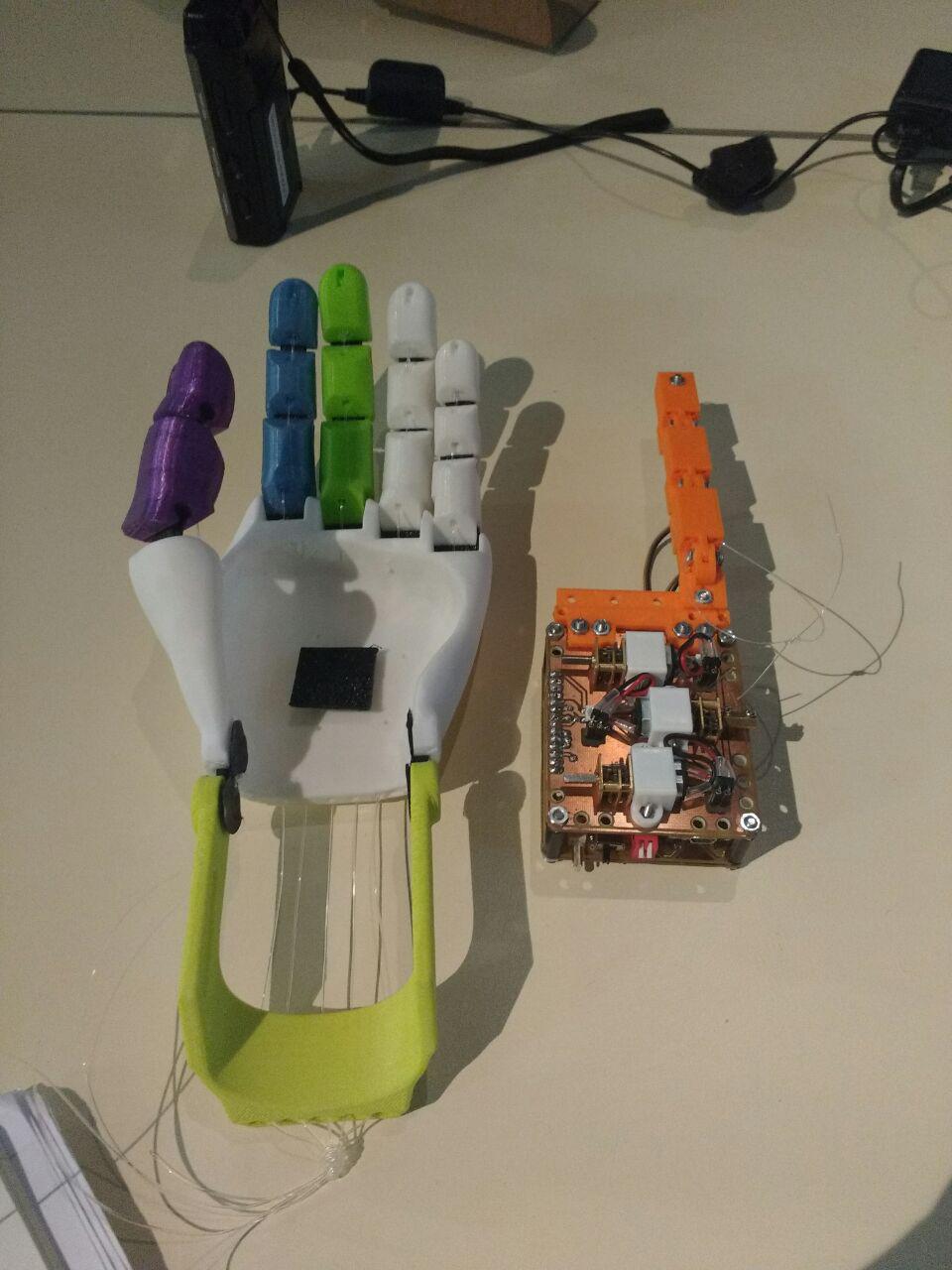
Pablo nos trajo la primera prueba de circuito, motores realizada con un dedo. Se trata de un Arduino y una placa diseñada para tres motores de revolución tipo Pololu con sus reductores. Ya pudimos ver el tamaño y las necesidades respecto a la prótesis impresa de la electrónica y mecánica que hacen falta. Como pudimos comprobar, no podrían caber en un modelo con las dimensiones de un niño por lo que algunas partes habría que recolocarlas en el antebrazo y otros sitios. También valoramos el peso, que sin batería no es tan excesivo (quizás menos de 1000gr). Aunque durante la reunión salió varias veces el tema de los materiales y pruebas de la parte electrónica y motora, hicimos un repaso de los materiales necesarios y las pruebas realizados con ellos para adquirirlos.
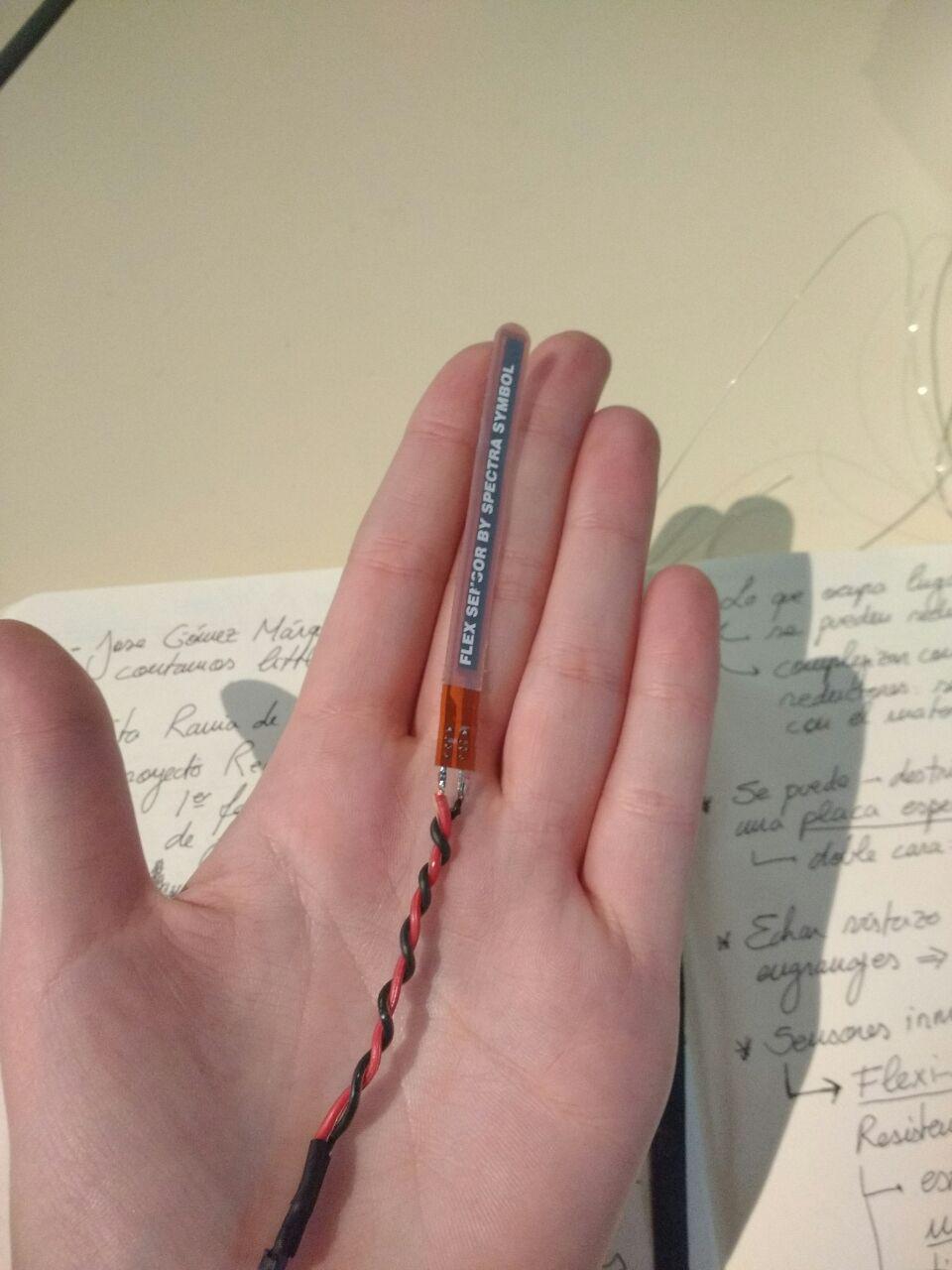
- Flexisensor: es un sensor alargado que se puede introducir a lo largo
 de los dedos y controlaría los motores según la curvatura del propio dedo. Tenemos que investigar si existen más pequeños que el ejemplo que nos mostró Pablo. Esta incorporación habría que estudiarla con cuidado en diseño pues hay que proteger el sensor del exterior.
de los dedos y controlaría los motores según la curvatura del propio dedo. Tenemos que investigar si existen más pequeños que el ejemplo que nos mostró Pablo. Esta incorporación habría que estudiarla con cuidado en diseño pues hay que proteger el sensor del exterior. - Electrónica: debemos tender a la estandarización y recursos ya disponibles. Pablo nos indicó que podemos trabajar con arduino y nano arduinos integrados en placas que completen las funciones que necesitamos. Por lo tanto, aprobamos
 comprar uno de cada tipo para tenerlos de base en el grupo de trabajo.
comprar uno de cada tipo para tenerlos de base en el grupo de trabajo. - Motores: los motores de Pololu con sus reductores parecen ser los más adecuados, adquiriremos algunos para seguir testeando. Buscamos otros en internet como los Maxon pero se escapan de nuestro alcance.
- Sensores: Lo de Myo son los más fiables y además tienen librerías para trabajar desde arduino con ellos. Testearemos si se puede con los que tiene un amigo de Pablo y si vemos que son los más óptimos, los adquirimos.
- Baterías: deben también ser estándares, pero por ahora no hemos encontrado las más óptimas. Las de polímero de litio son ligeras pero tóxicas.
Tras todo ello, dejamos pendiente la próxima reunión general para el martes 15 de diciembre a las 18:00. Por otro lado, se convoca reunión del equipo de Diseño para el 2 de diciembre y la de Desarrollo el 9 de diciembre.