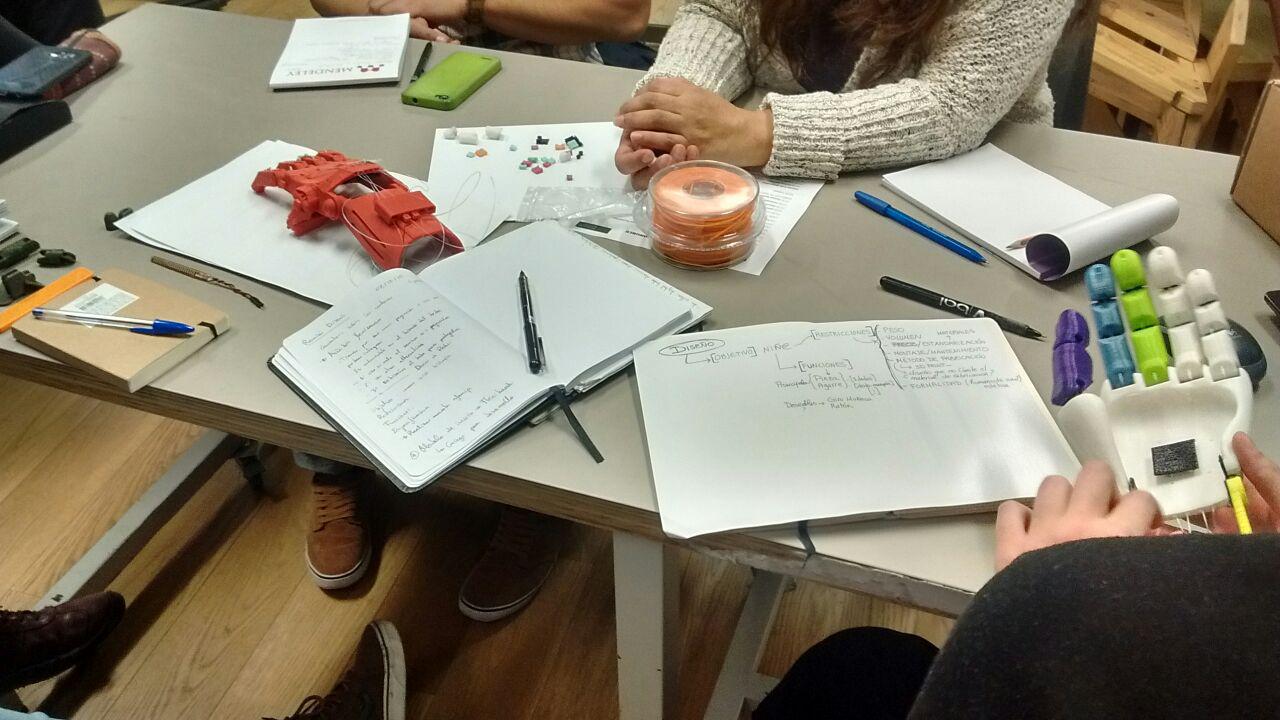
En esta primera reunión del equipo de desarrollo estábamos presentes 12 de los miembros del grupo, de los cuales muy pocos pertenecientes a otros equipos de trabajo.
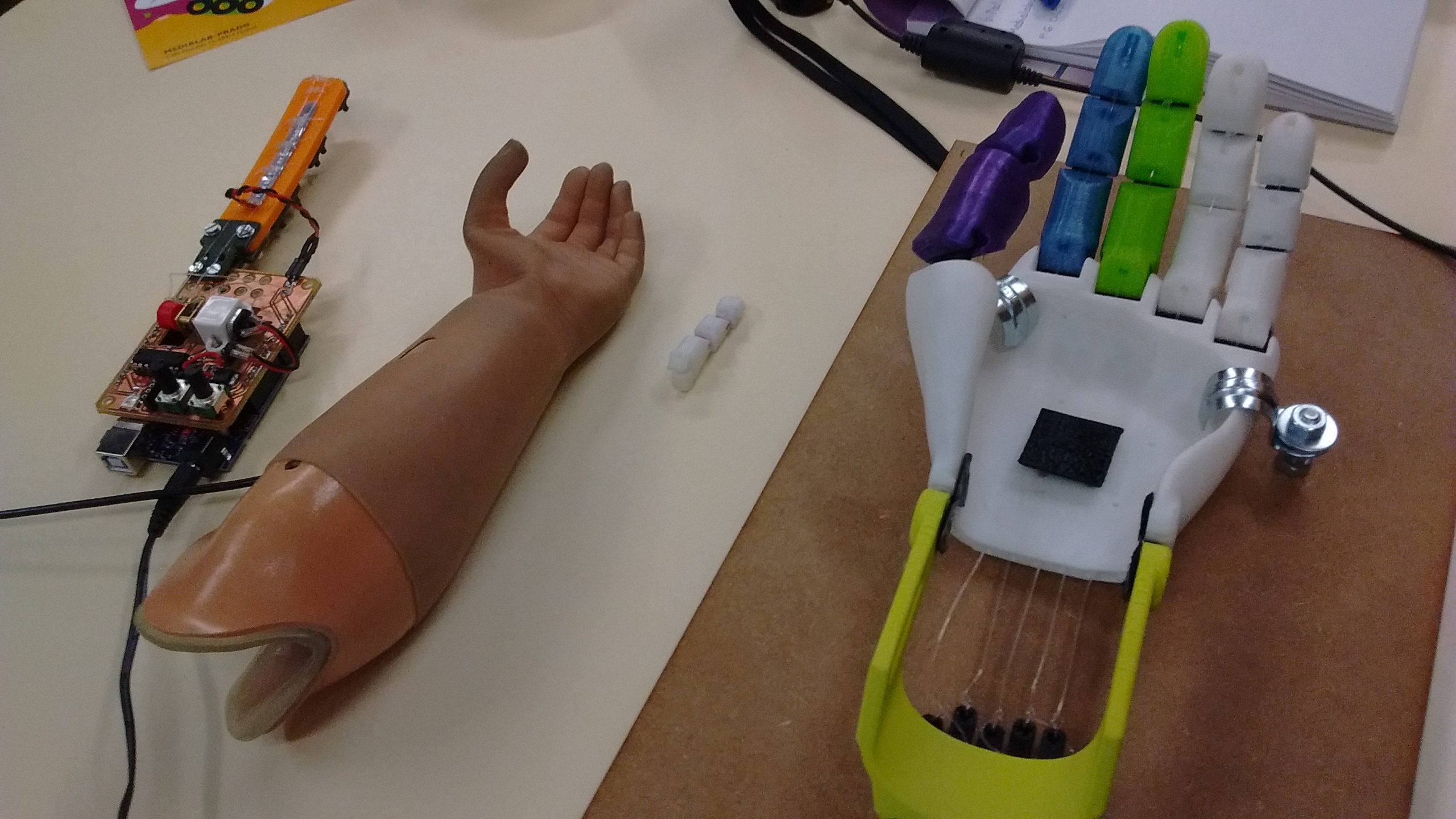
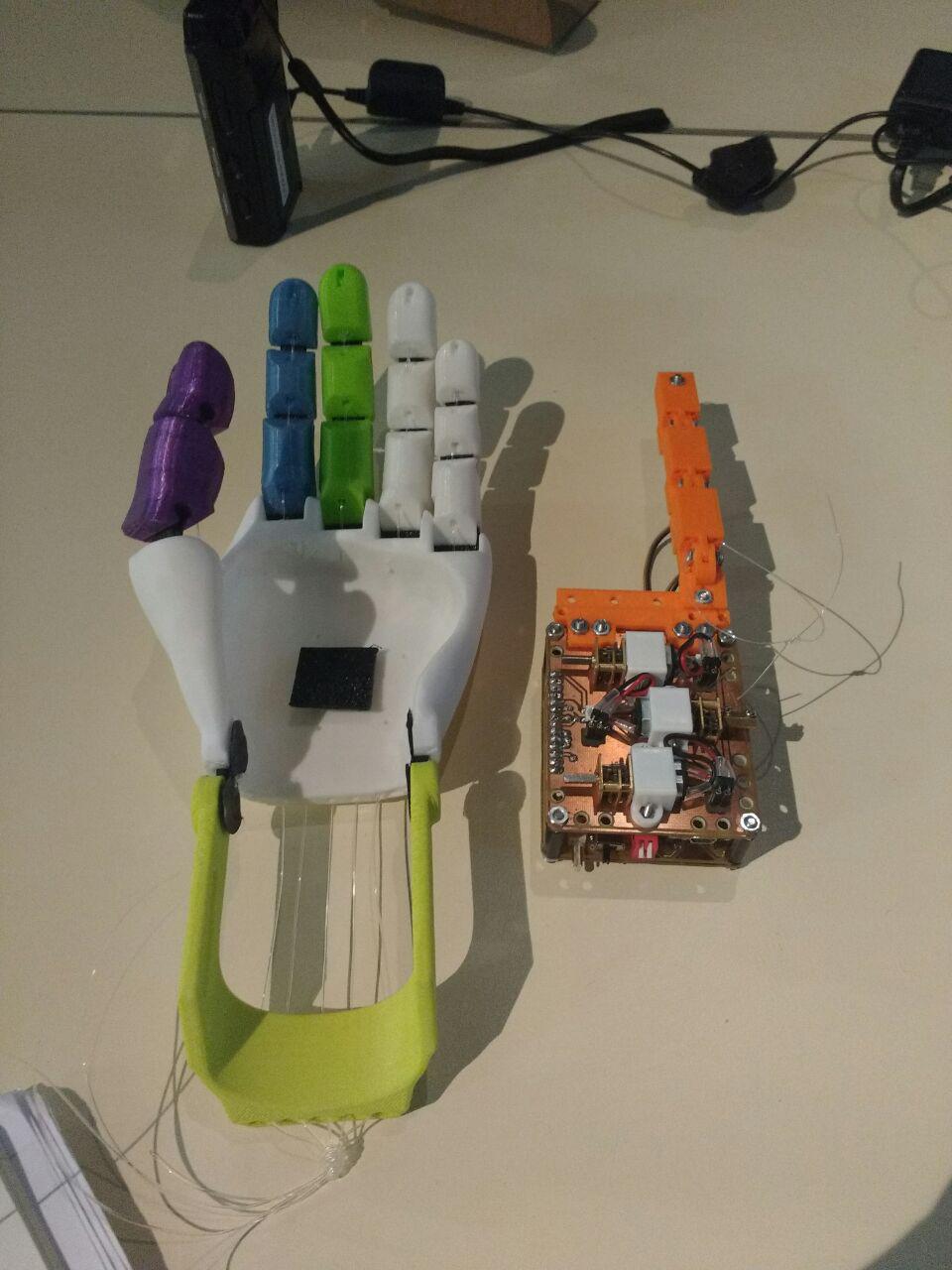
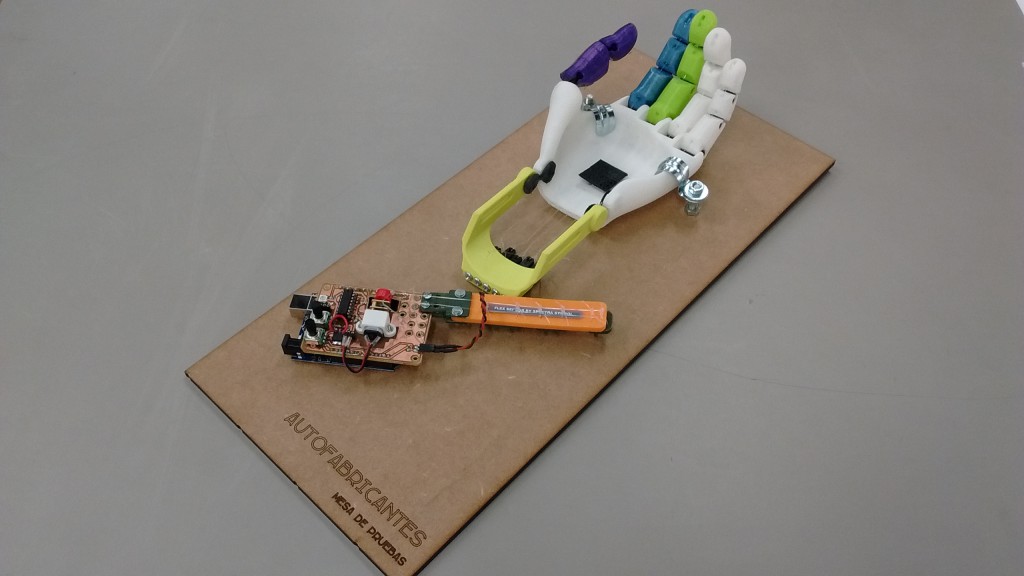
Pablo traía toda la electrónica y l a placa con un motor incorporado para poder ensamblarle un dedo con el flexisensor y comenzar a probar.
- -Las primeras pruebas
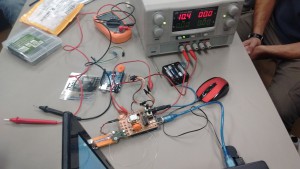 que hacemos con una fuente de pilas de 9V no tiene éxito por la fuerza que tiene que ejercer el motor para mover el dedo impreso con filaflex. Es un diseño demasiado rígido para poder trabajar con estos
que hacemos con una fuente de pilas de 9V no tiene éxito por la fuerza que tiene que ejercer el motor para mover el dedo impreso con filaflex. Es un diseño demasiado rígido para poder trabajar con estos  motores y aproximarnos a la potencia necesaria real que necesitaremos. Volvemos a probar con una fuente de alimentación regulable con 10 – 12V y si funcionan.
motores y aproximarnos a la potencia necesaria real que necesitaremos. Volvemos a probar con una fuente de alimentación regulable con 10 – 12V y si funcionan.
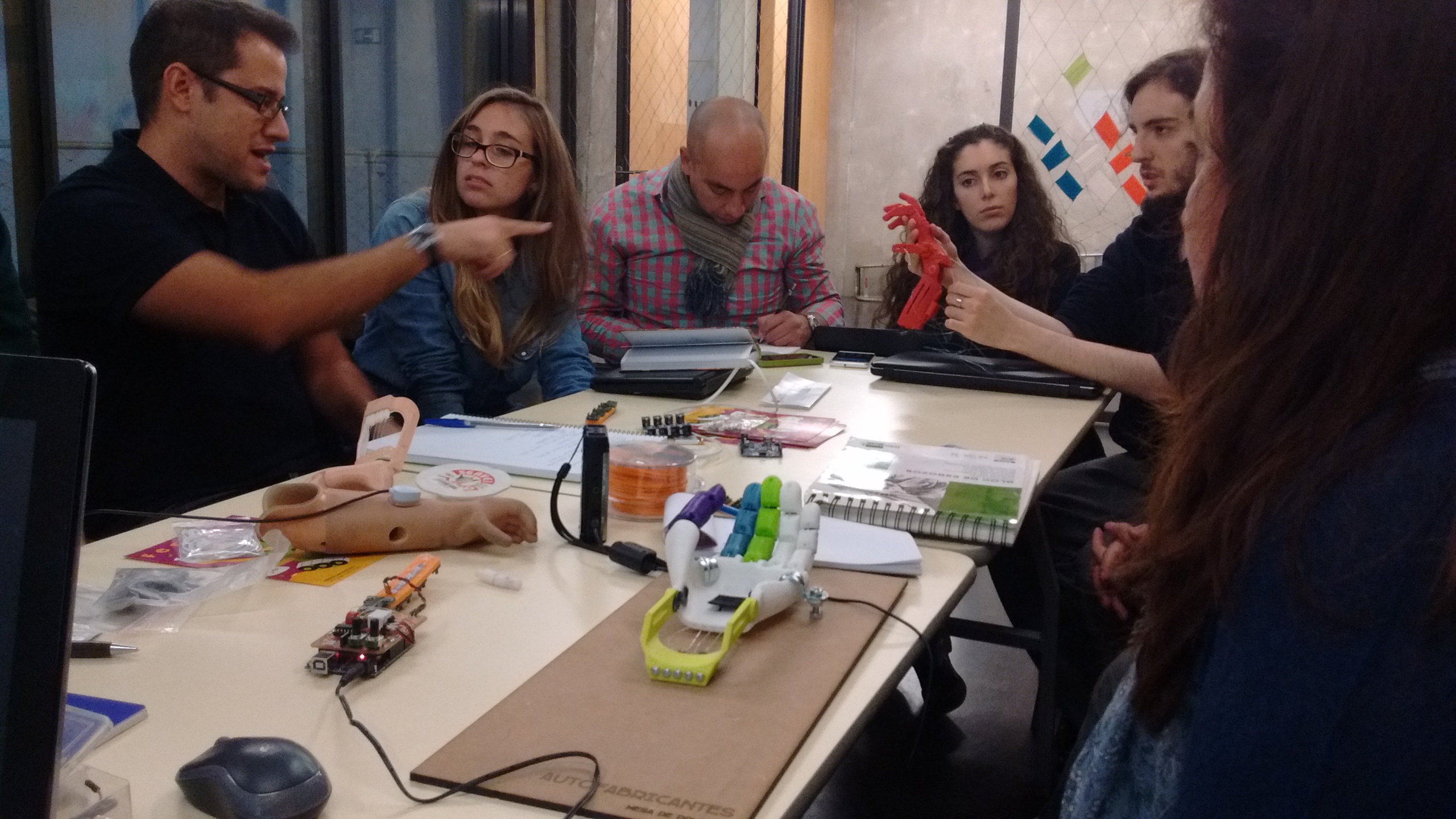
- Pablo nos explica y podemos testear la solución a la problemática sobre los motores de revolución. Como se están utilizando como falsos servomotores, se planteaba que estos motores una vez que lleguen a cierta posición, se paran, dejan de recibir corriente y dejan de ejercer presión. Esto implica que sin apenas esfuerzo retrocederían de la posición determinada, no como los servos que al llegar a una posición no pueden retroceder si no se les ordena. Bien, pues esto se puede solucionar si se cortocircuitan diseñando este modo desde el principio.
Seguimos tratando temas mientras se pone a punto el código para manejar el dedo.
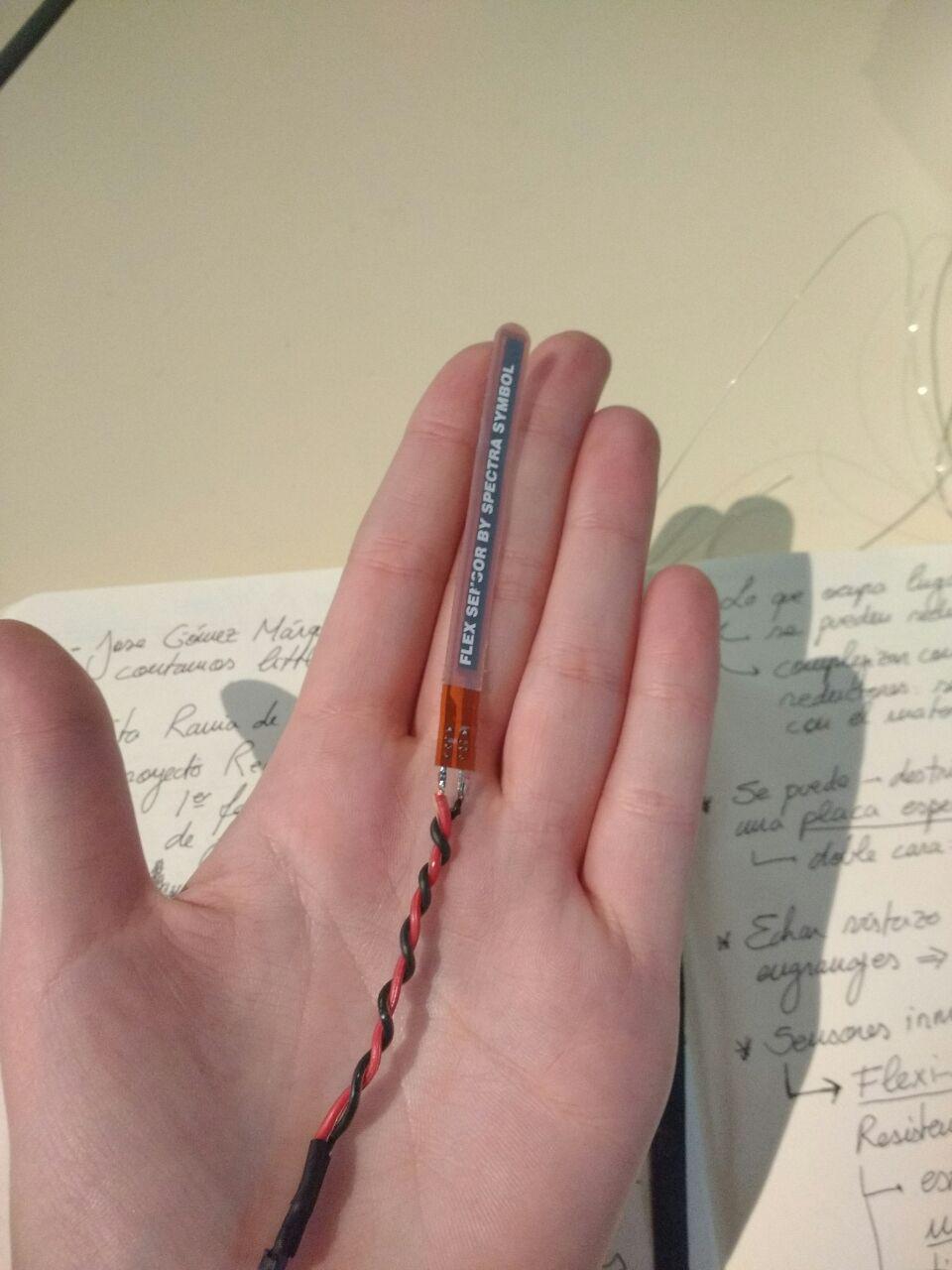
Los flexisensores que en diseño hemos detectado que tiene que ser más pequeños para incluirlos en el proyecto, a priori no existen. Nos ponemos como tarea buscar unos más pequeños o alternativas. Se ha planteado cortarlos a mano y puentearlos o incluso hacernos unos caseros, pero esto eliminaría fiabilidad al circuito y las señales.
Vemos la necesidad de hacer una mesa de trabajo en la que una mano esté anclada para poder trabajar con ella de manera más sencilla sin tener que anclar los dedos a la propia placa electrónica.
Se anota para el desarrollo de los circuitos la necesidad de incluir un botón o dispositivo de reinicio o parada de emergencia. Clara nos dice que es muy sencillo incluyendo un conmutador al inicio del circuito entre la batería y la placa.
Los sensores hasta ahora son el tema menos explorado y más difícil de testear por la falta de posibilidades y acceso a los existentes. Pablo nos confirma que el sensor Myo que intentaba conseguir por parte de un amino no va a ser posible. A la espera de encontrar otra alternativa para testear un sensor de este tipo, vamos a seguir investigando las librerías de arduino que tienen abiertas y ver las posibilidades reales que ofrece este sensor, los datos que permite manejar, etc. Por otro lado, vamos a comenzar a testear con los sensores básicos a los que sí tenemos acceso, algunos miembros se ofrecen a ceder temporalmente los suyos mientras compramos unos para el proyecto.
Al hilo de lo anterior, acordamos abrir una cuenta en GitHub para trabajar con los archivos de arduino o los que vayamos generando, para que sea más sencillo su manejo. Además como es una de las plataformas abiertas más utilizadas, esta cuenta la podremos utilizar para el resto de archivos que vayamos generando. Todo lo trabajado será más accesible y abierto.
El siguiente paso en la electrónica es diseñar y montar una placa con los tres motores y comenzar a probar. Lo ideal sería poder realizarla en la microfresadora del FabLab que los compañeros Emanuel y Rubén se han encargado de echar a andar. También se ha planteado la posibilidad de probar con servomotores para no descartar ninguna posibilidad, pero creemos mejor centrar los esfuerzos pues en ese campo ya se estaba trabajando en Exando una Mano.
Pensando en el diseño de la nueva placa, hay que imprimir una nueva rueda de enganche de los tensores con el motor que permita mejor conexión. Además, tenemos que pensar en la posibilidad de que los motores estén anclados directamente a la estructura de la mano para evitar excesivos esfuerzos en la placa electrónica.
Pasamos a repasar la lista de especificaciones que comenzamos en la última reunión general para ver qué afecta al área de desarrollo y que otras especificaciones se pueden añadir desde aquí.
- Volumen: posibilidad de colocar la placa en un lugar y los motores en otro.
- Peso: la mayor restricción estará en la batería.
- Autonomía: ídem con la batería.
- Dedo índice: implementar un cable que conecta con la piel para que sirva con las pantallas táctiles capacitativas.
- Movimiento de dedo para el ratón del PC: mejor incorporar una función de ratón en la que el arduino traduce directamente las señales de los dedos en el movimiento del ratón.
- Estandarización: más adelante hay que intentar reducir la placa diseñada por nosotros en drivers o circuitos que se puedan comprar.
- Temperaturas: revisar las temperaturas de funcionamiento de cada parte, sobre todo de la batería.
- Escalable: establecer límites de trabajo de los motores según fuerza que proporcionan y asignarlos a rangos de edad.
- Añadir un dispositivo que pueda regular la potencia y velocidad de movimientos, esto con sensores Myo creemos que no es necesario.
- Añadir un sensor de calor que avise de temperaturas muy altas para que el niño no se queme.
En la parte de software Juanjo comenta las tres partes en las que se divide el proceso: recepción de información, emisión de señales y biofeedback. Se acuerda investigar en cada una de ellas. En concreto el sistema de biofeedback que nos permita ensayar con la estimulación de los músculos y generar un sistema de autoaprendizaje de los sensores y motores.
En el FabLab se quedan parte de los componentes que ha traído Pablo y esperamos que pronto se vayan sustituyendo por los propios del proyecto. Están a disposición de todos para trabajar y testear.
Sin más, acordamos quedar esta misma semana en algún hueco que encontremos el fin de semana. También nos veremos en la reunión general del próximo martes 15 a las 18:00.
 Como encuentro importante o al menos destacado de estos días conté el que tuve con
Como encuentro importante o al menos destacado de estos días conté el que tuve con