Estuvimos un total de 20 personas en esta sesión del 23 de enero ¡todo un récord! Además de los avances semanales de cada área, este lunes hicimos una sesión corta pero intensa de evaluación y actualización global del equipo y el proyecto.
La sesión de trabajo fue más corta de lo habitual pero muy productiva por los avances semanales realizados:
Desarrollo:
Javi ha investigado sobre nuevos motores que nos permitan reducir tamaños aumentando un poco los costes.
Por un lado encuentra estos de Pololu con un encoder trasero con las mismas funciones que el nuestro actual, el problema que apunta Álvaro (ya los usa en su Dextra) es que hay que reposicionarlos cada vez que se enciende. Tiene un coste de unos 30€
También nos enseña los de Maxon, uno en concreto con dimensiones muy ajustadas ∅8mm y un coste bajo respecto a los de esa gama, 250€
Después de evaluar y consensuar si es pertinente subir los costes por motor para mayor fiabilidad o apostar por menor coste y accesibilidad investigando en un mejor control del encoder. Al final hemos decidido probar el Pololu con su encoder y ver las posibilidades de control.
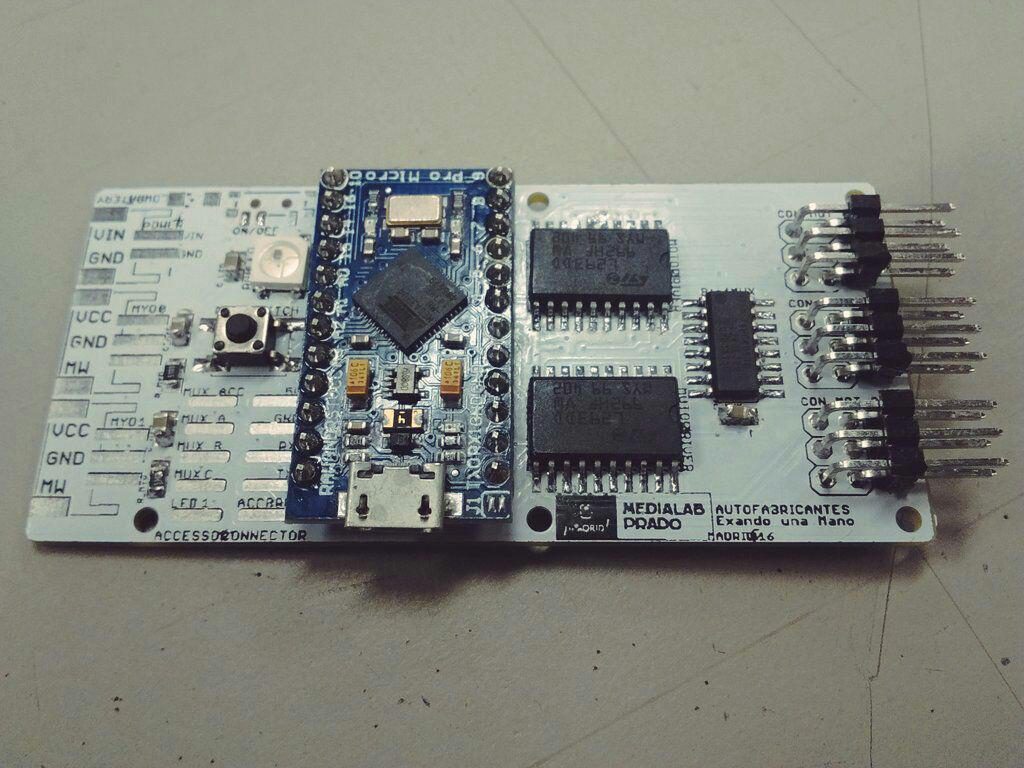
Nueva placa electrónica: Pablo y Clara siguen poniéndola a punto y han encontrado un pin mal colocado, pero lo han podido solucionar en la misma sesión con un bypass.
Código: Álvaro ha encontrado unos fallos en el código de la semana pasada y ya está solucionado. Uno de ellos era un comentario sobre uno de los sensores que afectaba de manera negativa sobre el otro sensor. También se ha detectado que en las pruebas de la semana pasada uno de los sensores daba ruido sobre el otro.
Esta semana vuelven a probar con los sensores de Álvaro y creo que volvían a dar fallo de lectura.
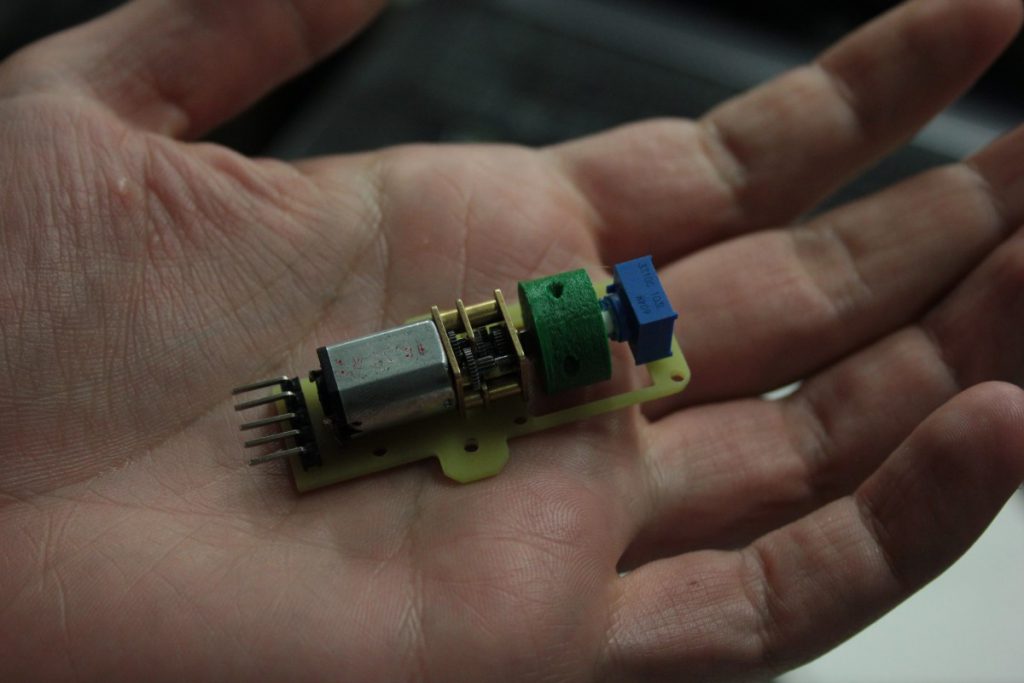
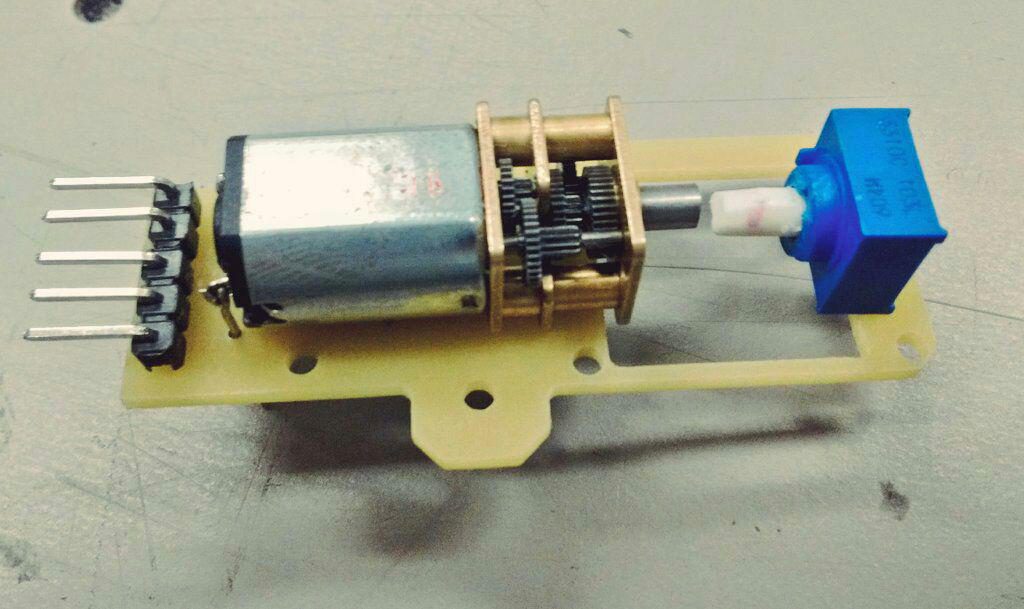
Motor y encoder: se monta y sueldan todas las partes del motor con el potenciómetro. Todo encaja perfectamente.
Diseño:
Diseño propio mioeléctrica:
Marta nos trae el 3D completo del antebrazo con la caja para un motor y la electrónica. Se compone de 3 piezas (antebrazo, tapa y junta elástica). A priori parece bastante grande, pero está ajustada a los tamaños interiores de electrónica. La semana que viene tendremos el modelo impreso, evaluamos y vemos de qué manera se puede integrar mejor todo el diseño del antebrazo.
Luis ha traido impresos las tres versiones de palma con los huecos para los motores. Comprobamos con los motores físicos y montados en la placa que no caben en ninguna de las versiones, las pestañas de sujeción molestan o rozan en alguna de las partes. También vemos que hay algunas disposiciones que no permiten un buen montaje o mantenimiento. Quedamos esta fase parada mientras se decide si continuamos con este sistema de encorder o probamos con los de Pololu.
Proyecto Jaime-Rafa:
Luis ha seguido integrando los gadget con los diferentes enganches.
Debatimos sobre el gadget del cuchillo para ver cual es la mejor solución. Melania nos enseña algunas soluciones que conoce.
Paola va a probar una espuma polimórfica que tiene por si nos sirviera para el interior del cuchillo y que se pueda sujetar cualquier tipo.
La sesión del 9 de enero fue un poco floja de asistencia, pero con muchas novedades. Os resumo un poco:
El lunes 30 o 6 vamos a hacer una reunión interna sobre revisión de objetivos y retos para 2017. Fijaremos fecha la semana que viene. También vamos a hacer próximamente una sesión abierta con las familias, etc. Será mas adelante, ya lo hablaremos.
Desarrollo:Tenemos nueva placa electrónica y es está genial!!!! Pablo ha testeado sus componentes y parece que todo va OK. A falta de ensamblar algunas cosillas, el próximo día empezaremos a trabajar con ella.La programación no ha avanzado pues Rosa necesitaba coordinar una parte con Álvaro.La placa del motor ya está lista, hemos ajustado longitud de conectores y el próximo día ensamblamos todo pues necesitamos rueda de tensor nueva y socket de sujeción.
Diseño:La nueva articulación funciona genial. Ha sido un trabajo largo de diseño y limpieza de mallas entre Marta y Rafa que ahora empieza a ver la luz. La siguiente fase es hacer hueco para los motores… Va a estar complicado… Jeje.
– Proyecto Rafa y Jaime: revisamos la nueva unión en giro que ha impreso Luis, a falta de unos ajustes, la vemos muy bien. Luis le hace los ajustes y va a probar también con otros materiales. Antonio va a buscar el sistema de agarre de una chica que conoce.
– Proyecto Leo: hicimos una prueba con él el 4 de enero y tuvimos muy buenos resultados. Los cambios a realizar son:
/Tornillos de cierre de la palma engarzados por el lateral, mejor que por arriba.
/Ensanchar la articulación de la muñeca 5mm. Sólo la articulación, no el hueco de la palma.
/Cambiar elásticos por unos menos fuertes.
/ Cambiar el sistema de agarre de sensores para hacerlo como el de Héctor, regulable y en métrica M3.
/ Mejorar resistencia del antebrazo haciéndolo más grueso.
/ Girar 5 grados el pulgar en dirección al índice.
/ Forrar el belcro del final del antebrazo.
/ Hacer la yema de los dedos indice y pulgar más plana para sujetar cosas pequeñas y circulares.
En esta sesión del 28 de noviembre hemos estado unas 10 personas y de manera muy resumida hemos realizado los siguientes avances:
Para una mejor coordinación de los grupos de Autofabricantes, hemos acordado retomar las actas de las sesiones de trabajo, breves y con lo realizado en cada sesión. Para ello necesitamos la colaboración de los asistentes tomando notas y la respuesta de los miembros que no puedan venir para ver si son útiles.
A nivel general contamos el proyecto un Instrumento para Henar que han contactado con nosotros para ver si colaboramos y les ayudamos a avanzar en la nueva versión de instrumento. Vamos a buscar también colaboración con los proyectos de Tecnologías de lo Sonoro de Jesús, Textil en Abierto de Eli.
Desarrollo:
Código con la máquina de estado ya montada para empezar a conectar los motores.
La lectura del sensor ya está afinada.
El próximo día vamos a hacer las primeras pruebas con los dos avances anteriores integrados.
La nueva placa se va a mandar a fabricar esta semana, mientras compraremos los componentes.
Debatimos sobre las conexiones de la nueva placa, por si limitan o no las diferentes lecturas de motores, etc. en principio no debe haber problema.
La malla textil para colocar los motores hay que rehacerla para el próximo día.
Se lanzó la idea de probar a hacernos nuestro propio sensor de corriente para control de los motores.
Diseño:
Proyecto mioeléctrica:
Hay que hacer la rueda de conexión del motor, potenciómetro y tensor.
Luis ha traído distintos modelos de prueba para la muñeca.
Nueva prueba de muñeca con un material nuevo, Wilowflex, tiene buena pinta.
Marta y Rafa siguen trabajando en la versión de mano más limpia de mallas y geometrías que incluye la opción de muñeca tipo 1 (una sola articulación).
Christian y Marta van a ponerse de acuerdo para definir la unión entre palma y antebrazo, seguimos evaluando las versiones de la opción tipo 2.
Héctor: vamos a añadirle el giro del pulgar como a Leo. Luis imprimirá una mano completa para tener una en Medialab.
Leo: Mónica se lleva la nueva palma para montar la mano completa, el pulgar funciona un poco mejor pero no termina de convencernos.
Jaime: Lidia ha traído las medidas y fotos pero faltan algunas para comenzar el modelo, tenemos que empezar a pensar ideas. Creamos nueva carpeta con toda la info en el drive.
También asistió a la sesión Antonio, el es parte de Nación Pirata, una tienda de gafas de sol que quieren colaborar con nosotros en algún proyecto específico y va a ser a través de una colaboración con la Fundación Rafa Puede. Nos ha propuesto que desarrollemos unos gadgets para Rafa para solventar diferentes actividades diarias. Tenemos todavía que evaluar las posibilidades y ser de qué manera acogemos esta iniciativa y colaboración, talleres específicos, u otras alternativas.
Esto os preguntaréis muchos al no saber nada de Autofabricantes desde hace un tiempo. Tras varios meses con muchísima actividad, pero poca información publicada… ¡¡Autofabricantes sigue con más energía y ganas!! Hemos estado muy atareados y con muchos frentes abiertos que nos ha hecho imposible llevar las publicaciones a la par. Desde ahora intentaremos ir actualizando con mayor frecuencia y de manera más ágil. En este post os resumimos los últimos meses de trabajo y dentro de poco iremos entrando en detalles.
En este último periodo hemos investigado en todos los frentes del proyecto de prótesis mioeléctrica. Avanzamos para conseguir pronto el primer prototipo apto para las pruebas con los peques de las familias del equipo. Hemos pasado por varias evoluciones de cada una de las 5 versiones del diseño, esto supone más de 300h de impresión 3D y mucho esfuerzo de diseño 3D en limar cada detalle y adaptación; Se han investigados 6 diseños de dedos diferentes para una transmisión de fuerzas adecuada; También muchos materiales de impresión 3D se han testeado, buscando una mayor resistencia y que las prótesis finales sean compatibles con el uso médico, esterilización, etc.
En la parte mecánica, se han investigado 5 tipos de motores y nanomotores hasta llegar a un modelo óptimo, pasando por fallos críticos en los que había que buscar otras soluciones; Se han probado varios sensores mioeléctricos hasta llegar a un sistema de recepción de señales estable, aunque queda trabajo todavía para conseguir mejores señales. Con la placa electrónica, diseñada para manejar todos los sensores y motores también hemos avanzado. En pocas semanas tendremos la nueva versión de placa, más pequeña y adaptada según las pruebas que ya hicimos con la versión primera. En la programación, tras constatar con las terapeutas que la mejor solución son las máquinas de estado, estamos desarrollando las diferentes versiones que permitan más movimientos con iteraciones sencillas. En general, queda mucho trabajo por delante, pero vamos avanzando sobre una experiencia que nos permite ir más rápido.
Aquí un video resumen de Luis Carlos sobre este año de trabajo.
Por otro lado, también hemos impreso en 3D una prótesis mecánica funcional (sin necesidad de electrónica, etc.) para Héctor que ya utilizan en su vida diaria, y estamos a punto de llegar al diseño óptimo de otra similar para las necesidades de Leo. Dos procesos muy emocionantes para el equipo en los que los peques han podido elegir y ayudar a montar sus propias asistencias técnicas. Ahora las utilizan como un elemento positivo en sus entornos. Hace poco, además, se ha unido otra familia para que busquemos soluciones a Aitor, un proyecto diferente pues necesita articular la mano desde el codo. Ya estamos buscando soluciones para este nuevo peque mientras llegamos a tener en funcionamiento la prótesis mioeléctrica.
En paralelo a la labor semanal del grupo de trabajo, hemos organizado junto a Alma Orozco, del proyecto Funcionamientos, las primeras Jornadas Diseños Libres para la Autonomía. Este espacio de conexión y reflexión surgió después de las Jornadas de Debatesque tuvimos en junio y en la línea de trabajo que ya venía trabajando Alma. Resultaron ser unas jornadas muy completas con diferentes actividades complementarias entre talleres específicos, debates abiertos con asociaciones, proyectos, mundo educativo, e instituciones. Pudimos conectar todos estos ámbitos para pensar la diversidad y las asistencias técnicas de otras maneras. Poder avanzar en redes más cohesionadas de iniciativas que buscan mayor autogestión y autonomía.
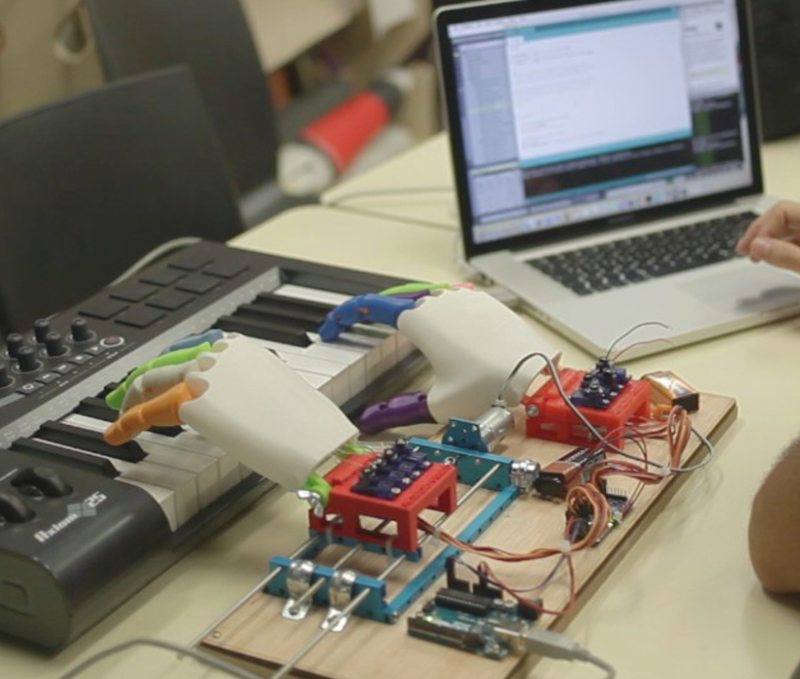
En todo este tiempo, también hemos seguido desarrollando junto a Jesús Jara que investiga en Tecnologías de lo Sonoro, el proyecto Liberace’s Wannabe. Una manera de unir las dos investigaciones utilizando las tecnologías que ambos grupos manejamos para hacer una instalación sonora con una mano que toca un teclado. El proyecto ha evolucionado y hace pocos días, Jesús estuvo en el Sheffield Institute of Arts contándolo dentro del Festival Algomech sobre tecnologías y música ¡¡gracias amigo!!
A la par que vamos avanzando, nos invitan a formar parte de eventos y espacios para contar el proyecto, mostrar alguna de las partes o aportar nuestra visión y recorrido. Así mismo, antes de verano formamos parte del Openlab de Medialab en el que contamos de manera coral todo el proyecto. Ya en septiembre estuvimos en el I Encuento Coruña Dixitalaportando nuestra experiencia de trabajo en comunidad, en compañía de Juan Freire, Jose Luis de Vicente o Beka Iglesias. Pocos días después, Autofabricantes estaba prensente de la mano de Christian, en las Jornadas de Universidad del Instituto 25M en la Universidad Complutense de Madrid en una mesa sobre ciencia ciudadana junto a grandes referentes en investigación científica. Esa misma semana, también participamos en la Maker Faire Madrid celebrada en nuestra propia casa dando una pequeña charla sobre lo que hacemos. En el mes de octubre, Luis participó en el Congreso Nacional Soluciones Contagiosas de la Fundación Plena Inclusión Madrid compartiendo escenario con fantásticos proyectos en torno a la diversidad. En este mas de Noviembre, hemos participado en Hangar.org de Barcelona en el encuentro Autoconstrucciones Colectivas sobre autogestión de recursos ciudadanos para la salud invitados por Xose Quiroga que desarrolla el proyecto IMVEC.
Por otro lado, a nivel expositivo, desde julio, el proyecto está en la zona de estaciones de trabajo en Medialab-Prado y en septiembre parte del proyecto se expuso dentro de la inauguración en la UCL de Londres del proyecto europeo Do It Together en el que participa Mediala.
Respecto a las comunicaciones en otros medios, cabe destacar la entrevista que nos hicieron en La Aventura del Saber en La2 y la mención que hizo Antonella Boglia en el programa Para Todos La 2 a finales de octubre.
Con mucho trabajo y camino por delante, echamos la vista atrás y reconocemos un gran esfuerzo de cada parte de esta comunidad que es Autofabricantes, un equipo fantástico que hacen posible cada pequeño avance y tener cada vez más cerca alcanzar el gran reto propuesto. Seguimos!!
Ha sido una reunión más corta de lo usual de repaso del trabajo realizado y testeo de los sensores MyoWare de Advancer Technologies.
Los avances de la sesión de trabajo han sido:
Revisar la respuesta de sensores Myo que nos descarta el uso del brazalete Myo.
Añadimos más preguntas a la encuesta a los padres.
Testeamos los sensores de Myoware que nos ha prestado Nacho
Buscamos nuevos sensores efecto hall (magnéticos), los que teníamos no valen.
Las tareas pendientes para el próximo día son:
Probar nuevos sensores magnéticos
Probar en una placa nueva el funcionamiento de los 3 motores con los 3 sensores magnéticos.
Comprar más sensores Myoware y comenzar a dominarlos.
Publicar las especificaciones y documentos de trabajo en el blog y Github.
Mandamos una tarea al grupo de Diseño e Impresión. Tener al menos una mano (aunque no sea definitiva) que albergue los tres motores para comenzar a probar la fuerza y reacción de los mismo.
Explicación de la sesión de trabajo
La sesión comenzó un poco más tarde de lo habitual y acabamos un poco antes también. Mientras llegaban otros miembros del equipo estuvimos repasando la lista de requerimientos para añadir algunas preguntas a la encuesta que vamos a enviar pronto a los martes. Acordamos ir haciéndola durante este fin de semana, repasarla el martes en la reunión general y enviarla.
Después revisamos la contestación de la empresa de los sensores Myo que nos da como referencia varios foros en los que están trabajando sobre la interacción del brazalete con Arduino. También vemos que vamos a tener que descartar el uso de este sensor por no disponer de tamaño para niños menores de 12 años. Aquí tenéis la respuesta:
There are basically 2 ways to get data from Myo to an Arduino device/project:
Connect Myo to an intermediary device such as a computer or mobile device using Bluetooth 4.0 LE and then connect the intermediary device to Arduino (wireless or serial). Here’s a great post from our Developer Blog on this.
Myo can send the gesture/pose activation data when it recognizes gestures (Fist, Fingers Spread, Double Tap, Wave Left, Wave Right) and it can send the IMU and raw EMG data. The EMG data is unitless and converted into a uint_8 value which represents activation.
The Myo armband has been designed to fit an arm with a circumference between 19 cm and 34 cm (7.5-13.4 inches). The armband should fit comfortably snug, not sliding on the arm when it’s moved. Typically we say for ages 12 and up so those younger or who have smaller arms, it likely won’t fit well and thus not work correctly.
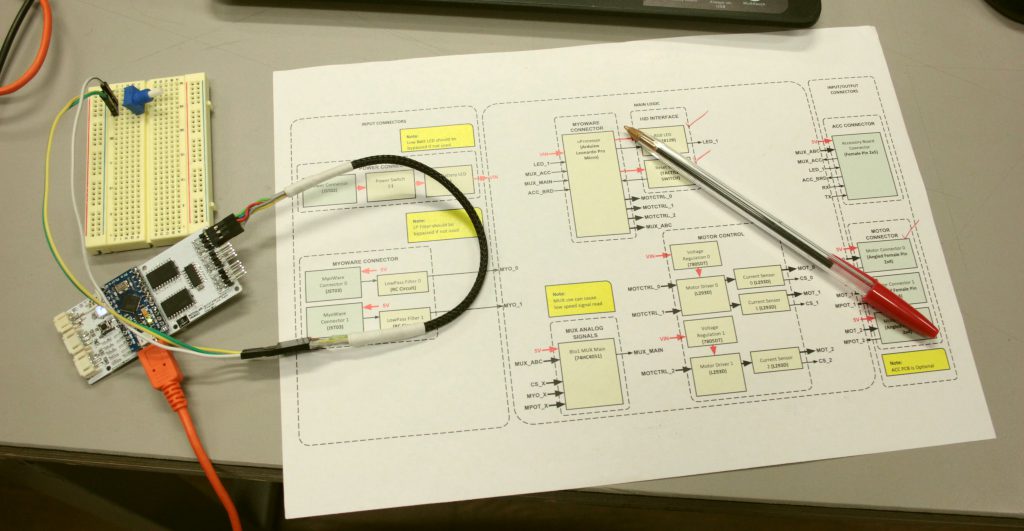
Seguimos analizando la información que nos ha mandado Manuel para poder testear los sensores de Myoware que nos está prestando Nacho. Aquí todo:
Para leer la señal en del arduino y monitorizarla en el arduino.
El código del proyecto frances bionico para la lectura de las señales y todo el control de los servos pero a mi no me compilaba en el ordenador algo haria yo mal.
Aquíaparecen fotos de como conectar pero no estoy muy seguro si le funciona.
También nos ha mandado avances sobre el sistema alternativo de bloqueo de los dedos, pero lo investigaremos mejor en la próxima reunión general.
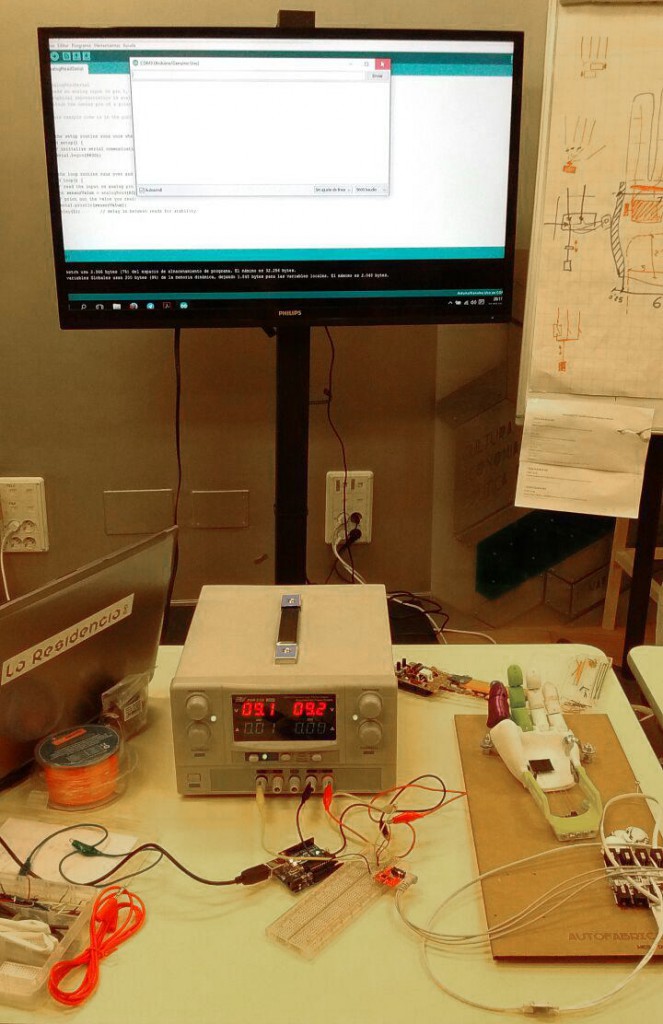
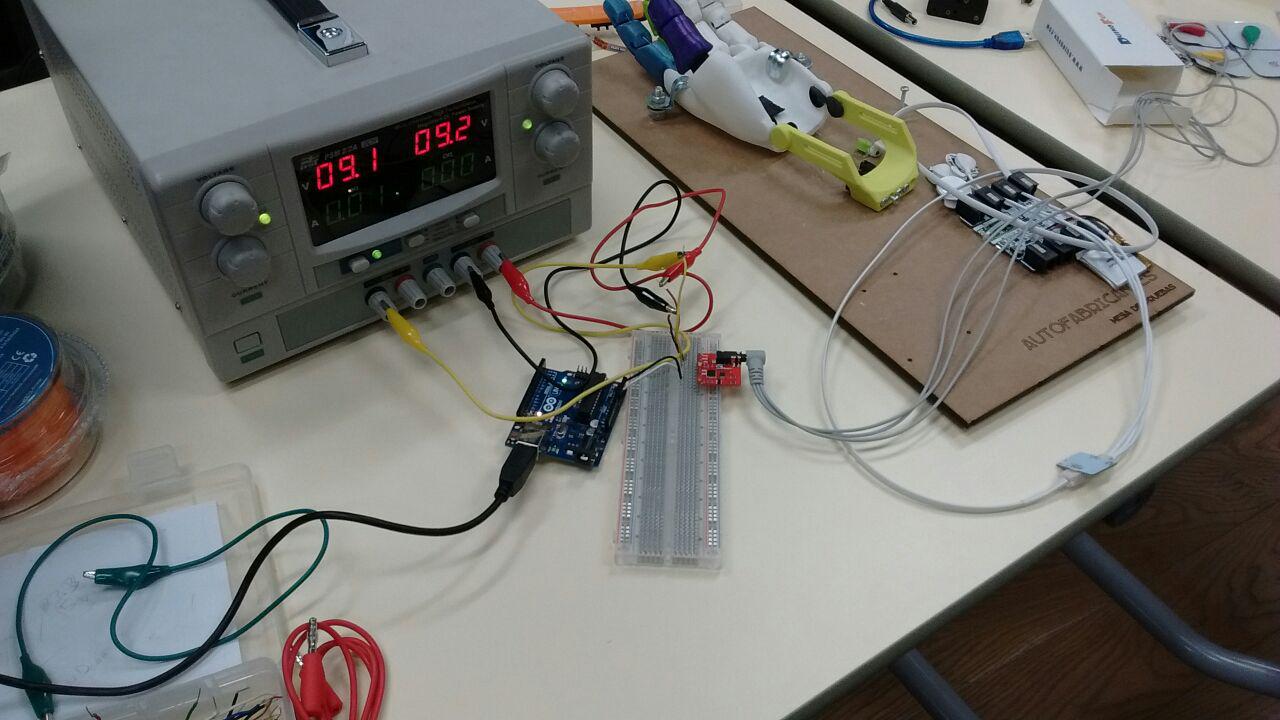
Con toda información y la celeridad de Pablo hacemos la primera prueba de los sensores, comprobando que una de las placas de las que disponíamos está quemada. Tras comprobar que dan una señal bastante buena con la que podemos trabajar, decidimos comprar más para completar el sistema.
Para finalizar hacemos un repaso de las tareas pendientes (indicadas al inicio) y nos despedimos hasta la próxima reunión general el martes 26 de enero.





 Seguimos analizando la información que nos ha mandado Manuel para poder testear los sensores de Myoware que nos está prestando Nacho. Aquí todo:
Seguimos analizando la información que nos ha mandado Manuel para poder testear los sensores de Myoware que nos está prestando Nacho. Aquí todo: