Ha sido una reunión más corta de lo usual de repaso del trabajo realizado y testeo de los sensores MyoWare de Advancer Technologies.
Los avances de la sesión de trabajo han sido:
- Revisar la respuesta de sensores Myo que nos descarta el uso del brazalete Myo.
- Añadimos más preguntas a la encuesta a los padres.
- Testeamos los sensores de Myoware que nos ha prestado Nacho
- Buscamos nuevos sensores efecto hall (magnéticos), los que teníamos no valen.
- Las tareas pendientes para el próximo día son:
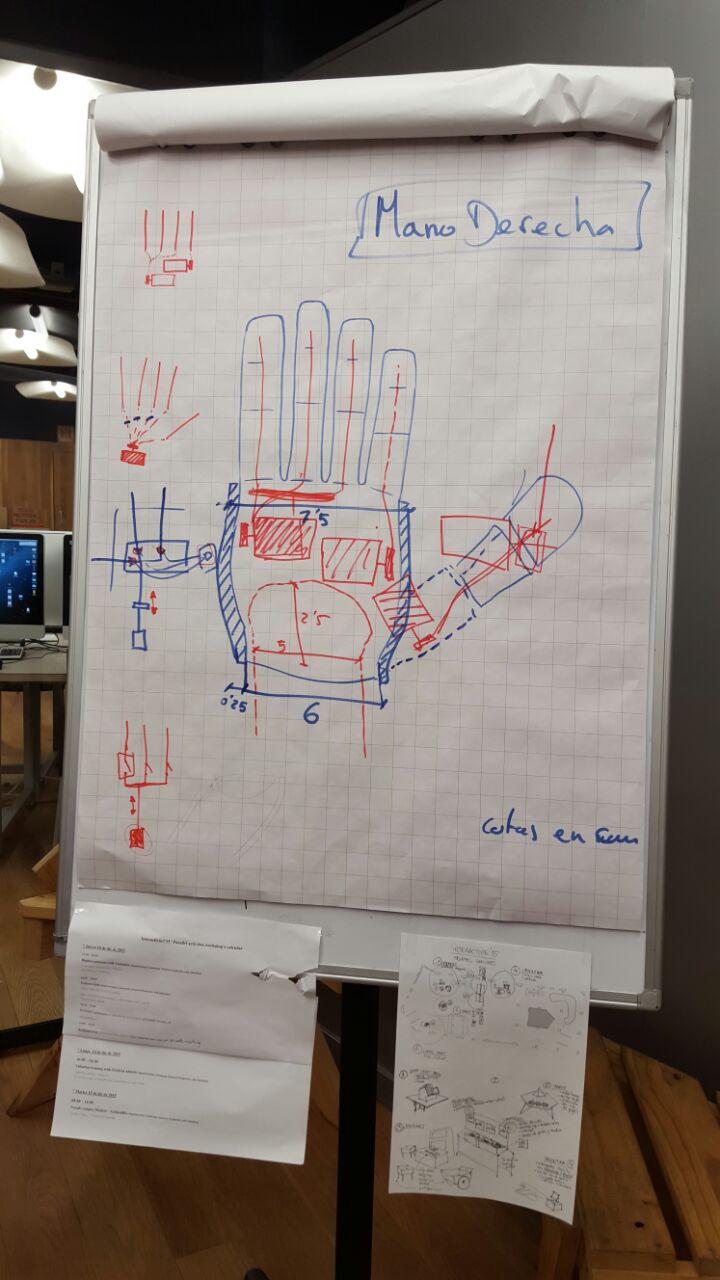
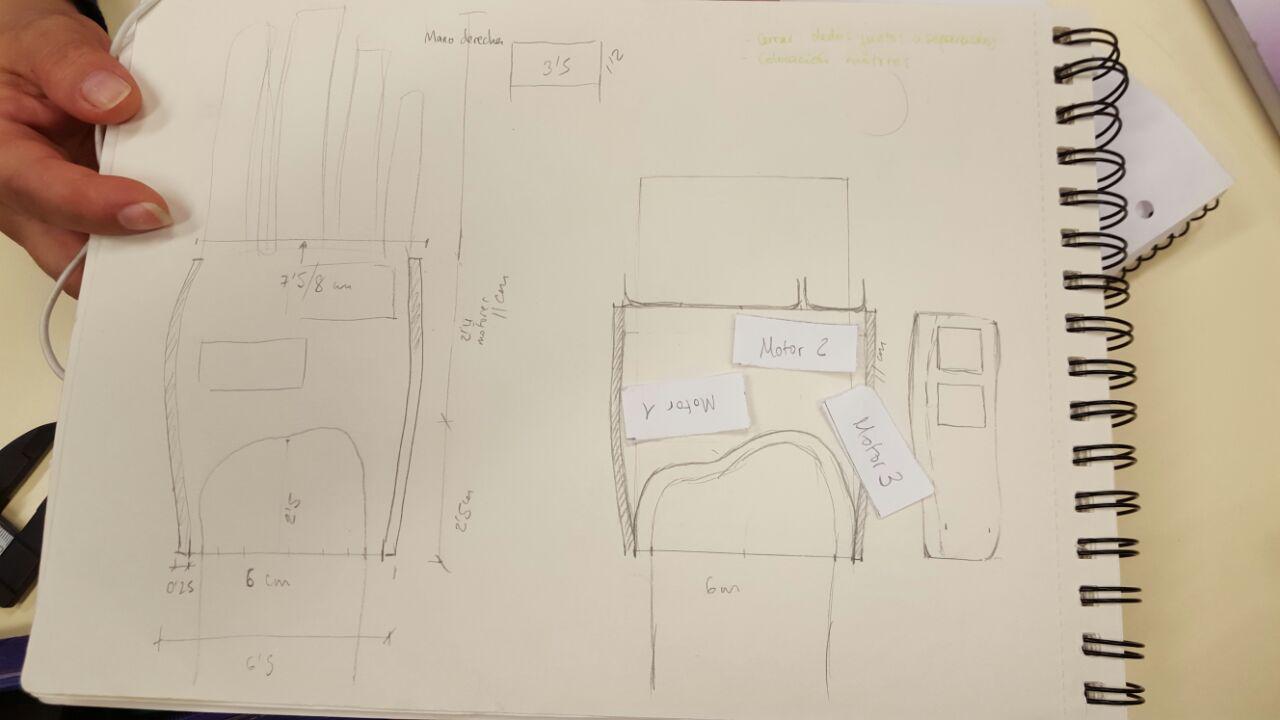
- Mandamos una tarea al grupo de Diseño e Impresión. Tener al menos una mano (aunque no sea definitiva) que albergue los tres motores para comenzar a probar la fuerza y reacción de los mismo.
Explicación de la sesión de trabajo
La sesión comenzó un poco más tarde de lo habitual y acabamos un poco antes también. Mientras llegaban otros miembros del equipo estuvimos repasando la lista de requerimientos para añadir algunas preguntas a la encuesta que vamos a enviar pronto a los martes. Acordamos ir haciéndola durante este fin de semana, repasarla el martes en la reunión general y enviarla.
Después revisamos la contestación de la empresa de los sensores Myo que nos da como referencia varios foros en los que están trabajando sobre la interacción del brazalete con Arduino. También vemos que vamos a tener que descartar el uso de este sensor por no disponer de tamaño para niños menores de 12 años. Aquí tenéis la respuesta:
There are basically 2 ways to get data from Myo to an Arduino device/project:
- Directly connect Myo to Arduino via Bluetooth 4.0 LE connection. Here’s a great thread from our Developer Forums on this.
- Connect Myo to an intermediary device such as a computer or mobile device using Bluetooth 4.0 LE and then connect the intermediary device to Arduino (wireless or serial). Here’s a great post from our Developer Blog on this.
Myo can send the gesture/pose activation data when it recognizes gestures (Fist, Fingers Spread, Double Tap, Wave Left, Wave Right) and it can send the IMU and raw EMG data. The EMG data is unitless and converted into a uint_8 value which represents activation.
The Myo armband has been designed to fit an arm with a circumference between 19 cm and 34 cm (7.5-13.4 inches). The armband should fit comfortably snug, not sliding on the arm when it’s moved. Typically we say for ages 12 and up so those younger or who have smaller arms, it likely won’t fit well and thus not work correctly.
 Seguimos analizando la información que nos ha mandado Manuel para poder testear los sensores de Myoware que nos está prestando Nacho. Aquí todo:
Seguimos analizando la información que nos ha mandado Manuel para poder testear los sensores de Myoware que nos está prestando Nacho. Aquí todo:
AdvancerTechnologies/MuscleSensorV3
Código
- El de la página del sensor Advancer Technologies/MuscleSensorV3.
- Para leer la señal en del arduino y monitorizarla en el arduino.
- El código del proyecto frances bionico para la lectura de las señales y todo el control de los servos pero a mi no me compilaba en el ordenador algo haria yo mal.
- El código utilizado por BQ para leer la señal.
Aquí aparecen fotos de como conectar pero no estoy muy seguro si le funciona.
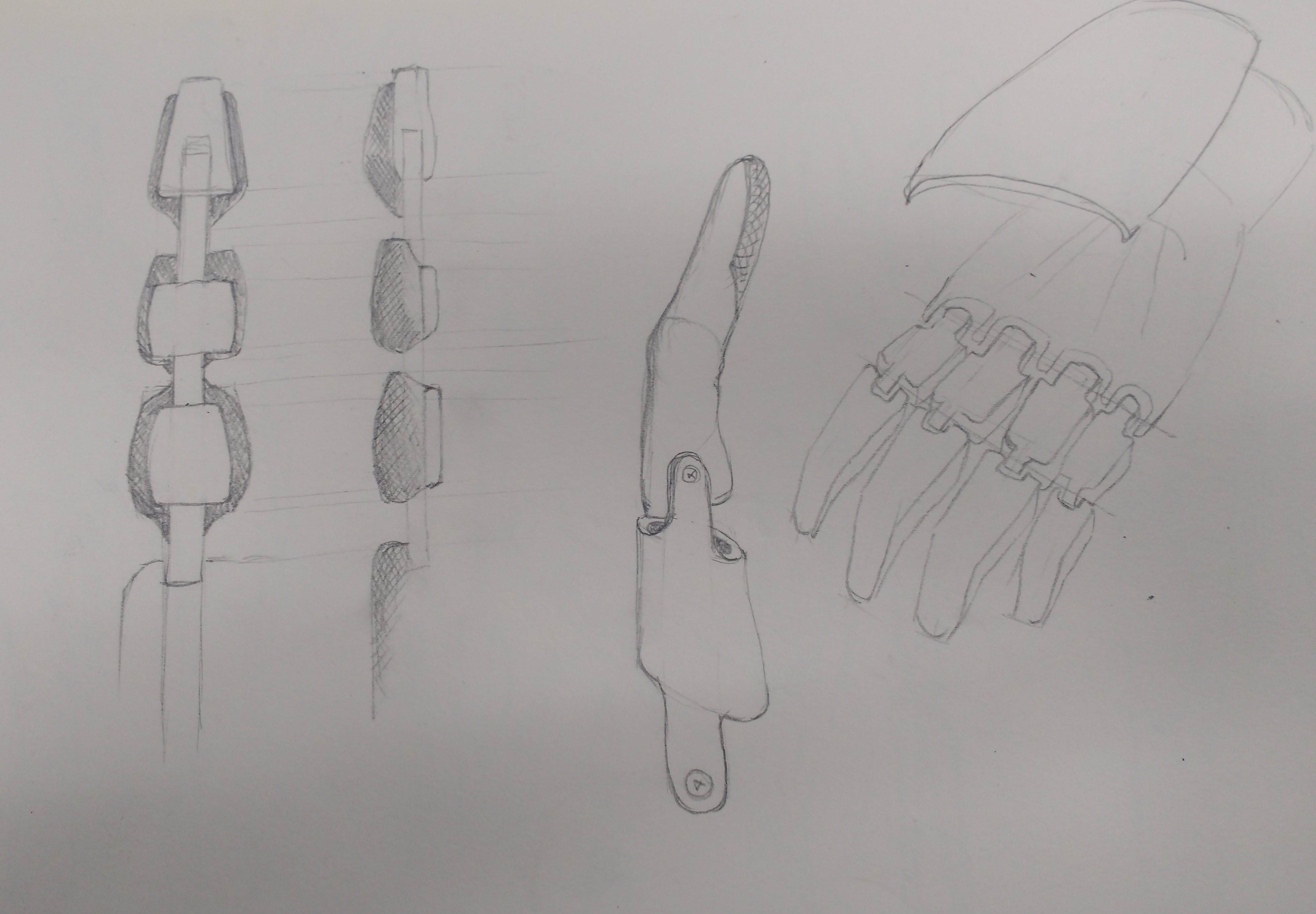
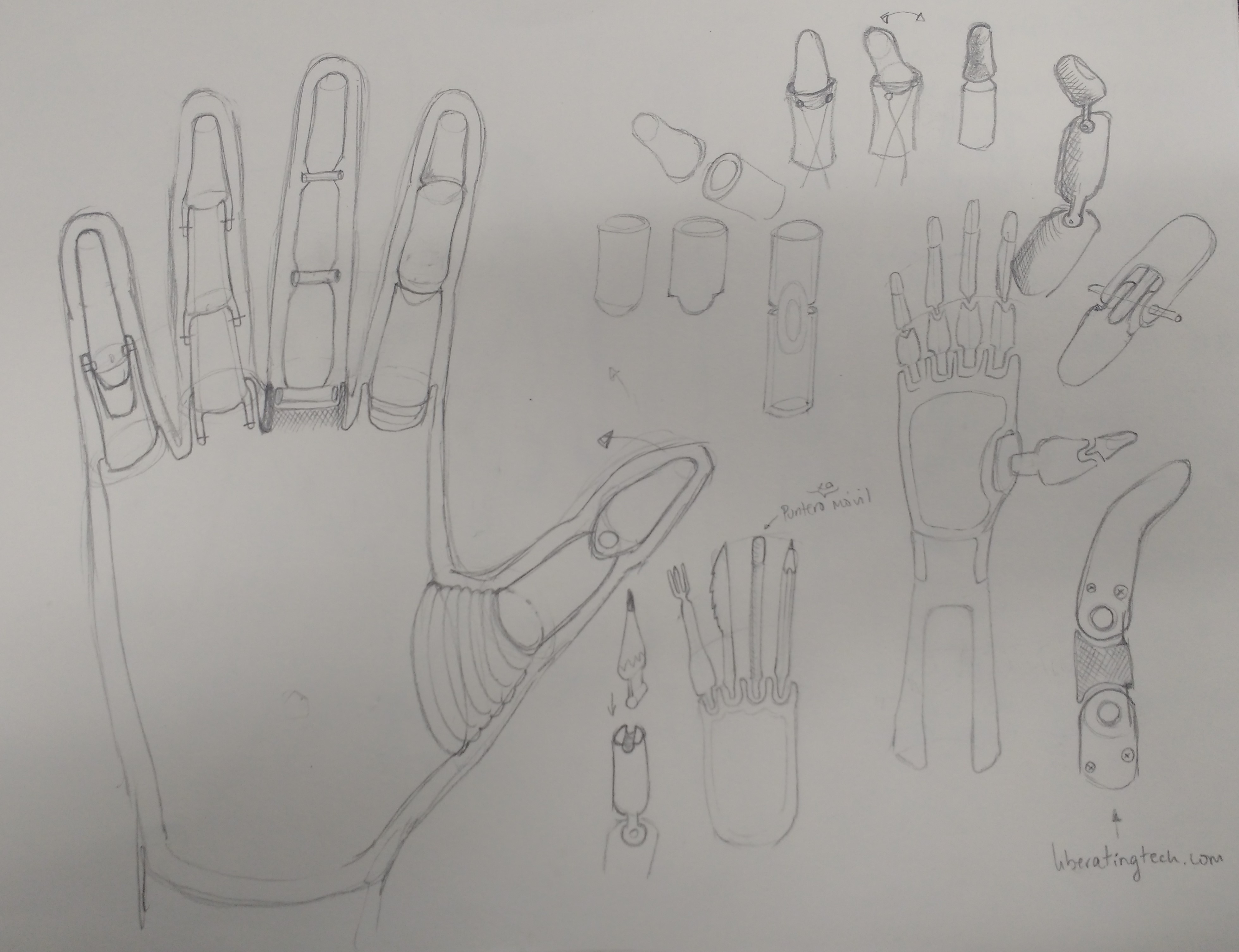
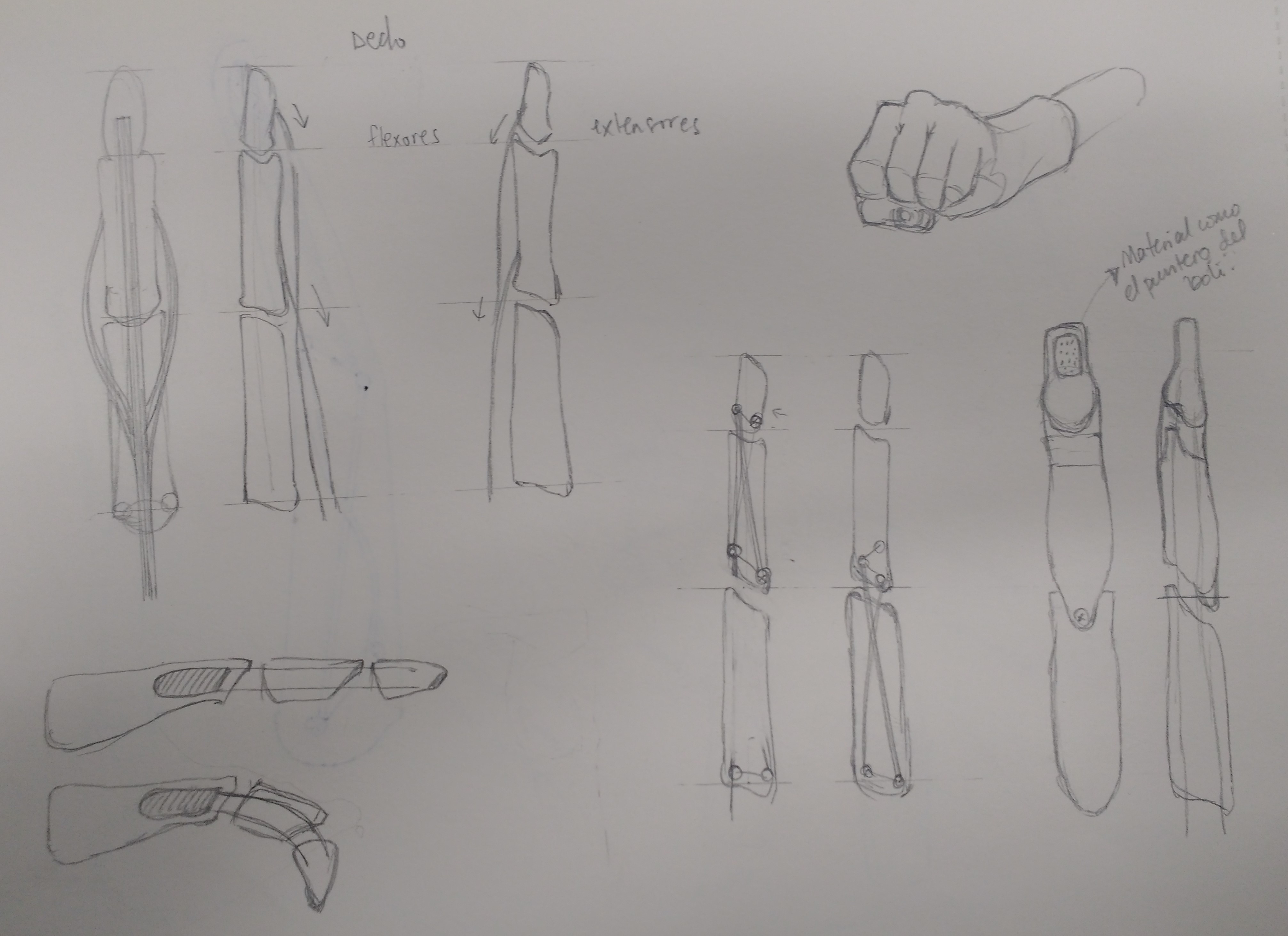
También nos ha mandado avances sobre el sistema alternativo de bloqueo de los dedos, pero lo investigaremos mejor en la próxima reunión general.
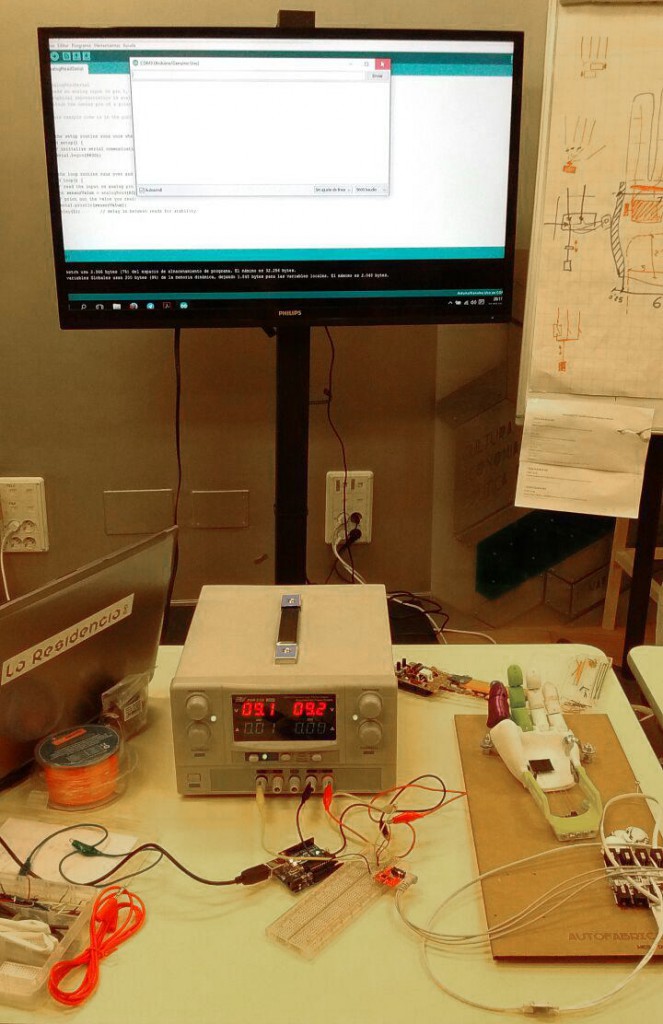
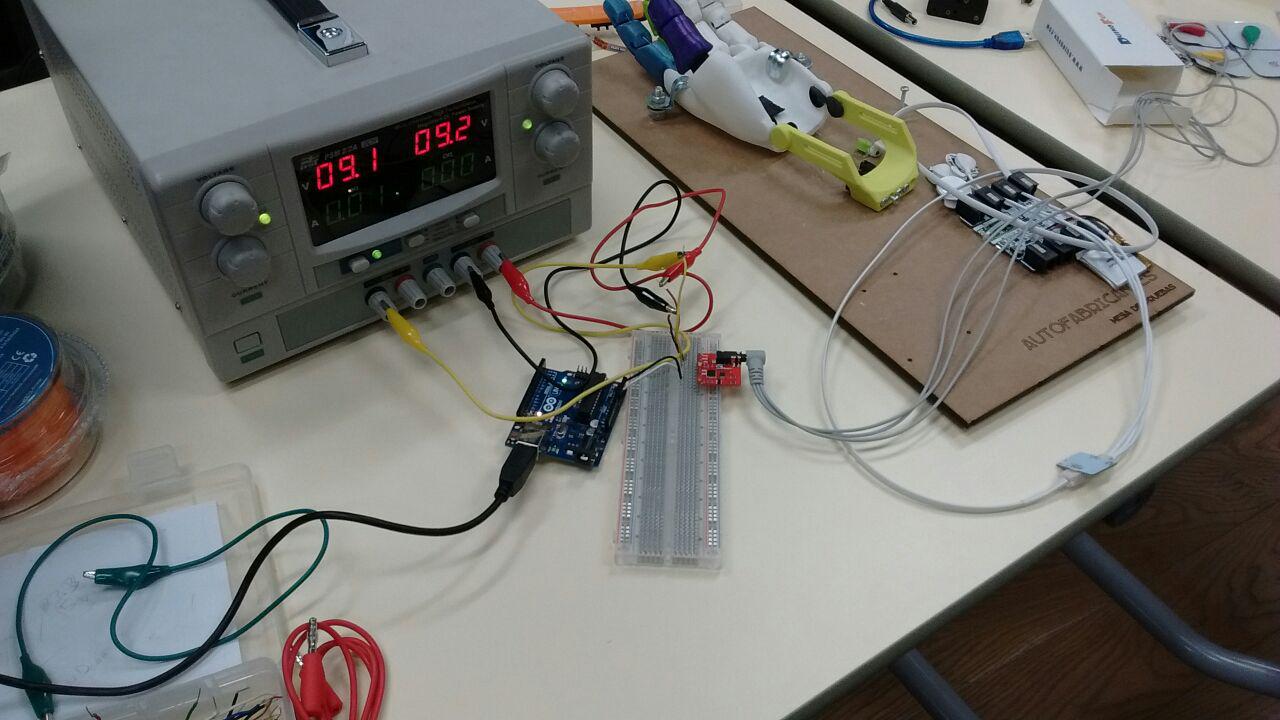
Con toda información y la celeridad de Pablo hacemos la primera prueba de los sensores, comprobando que una de las placas de las que disponíamos está quemada. Tras comprobar que dan una señal bastante buena con la que podemos trabajar, decidimos comprar más para completar el sistema.
Para finalizar hacemos un repaso de las tareas pendientes (indicadas al inicio) y nos despedimos hasta la próxima reunión general el martes 26 de enero.

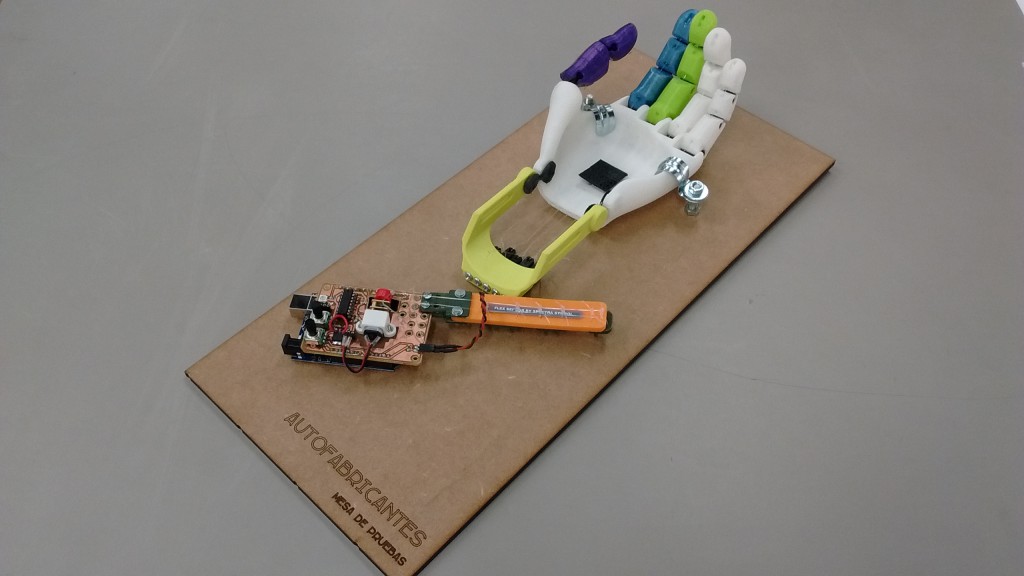
 que hacemos con una fuente de pilas de 9V no tiene éxito por la fuerza que tiene que ejercer el motor para mover el dedo impreso con filaflex. Es un diseño demasiado rígido para poder trabajar con estos
que hacemos con una fuente de pilas de 9V no tiene éxito por la fuerza que tiene que ejercer el motor para mover el dedo impreso con filaflex. Es un diseño demasiado rígido para poder trabajar con estos  motores y aproximarnos a la potencia necesaria real que necesitaremos. Volvemos a probar con una fuente de alimentación regulable con 10 – 12V y si funcionan.
motores y aproximarnos a la potencia necesaria real que necesitaremos. Volvemos a probar con una fuente de alimentación regulable con 10 – 12V y si funcionan.