Comenzamos la reunión general con menos asistentes de lo habitual, pero se van incorporando más durante la reunión.
Resumen, los temas principales tratados han sido:
- Posición de los motores (nuevo debate)
- Necesidad de escanear para proseguir el diseño.
- Avances en Modelado
- Primera reunión con “Proyecto Héctor”
- Avances en Desarrollo
- Llamada al equipo de programación
- Llamada de colaboración a personal sanitario
- Avances para hacer el Encuentro Nacional
Desarrollo de la reunión:
Quizás por las sesiones de los días pasados para contar el proyecto a la prensa, la asistencia a esta reunión general es más baja. Por el contrario, estas sesiones “de prensa” también han servido para avanzar en las áreas de modelado y desarrollo.
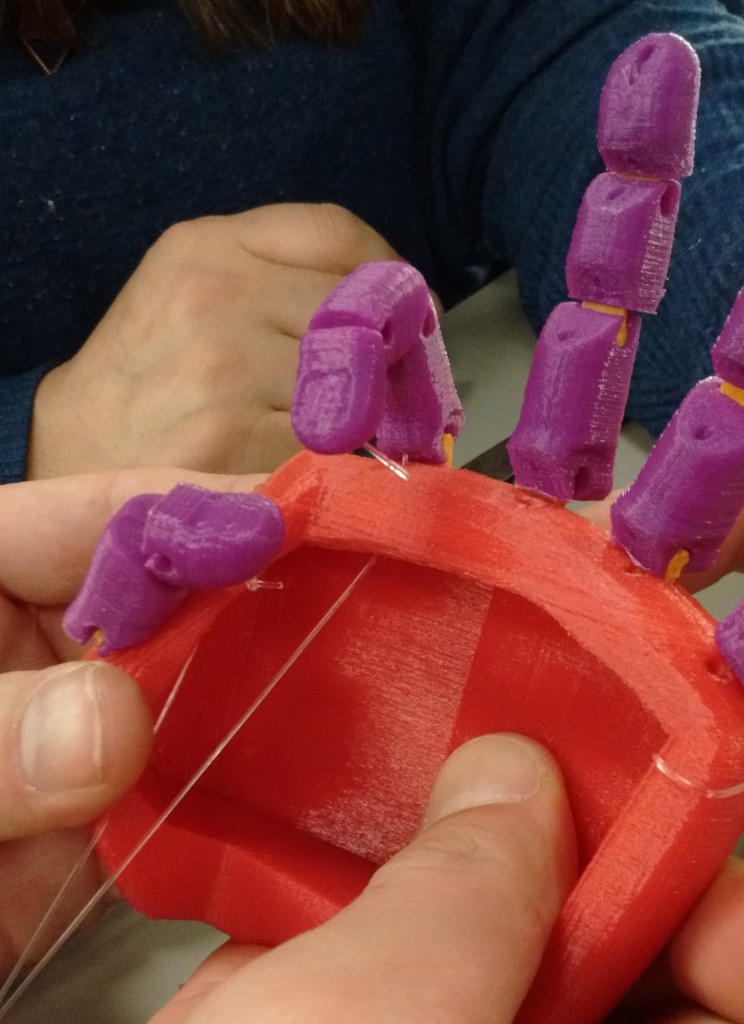
En primer lugar, parte de lo avanzado y debatido en el diseño ha sido respecto a la posición de los motores que al menos en el pulgar necesitamos que se clarifique y en el motor del meñique-anular-corazón tenemos que repensar cómo funciona el enganche de los tres tensores a la vez. Ya hemos impreso los dos primeros diseños para comprobar los tamaños, fallos y mejoras. Respecto al segundo modelo apuntamos en una de las reuniones las siguientes modificaciones:
- Aplanar el área de los motores para que tengan más espacio.
- Disminuir el ancho superior de la palma y más corta.
- Ahuecar el encuentro de los dedos con la palma para un giro mayor.
- Añadir a la palma los anclajes de los motores.
- Hacer dedos más grandes y anchos.
- Colocar anclaje de dedos a la palma más juntos.
- Añadir un sistema de giro con la muñeca y liberar el inferior de la palma para muñón.
 Para continuar con el modelado se hace URGENTE escanear al menos el muñón del niño de Consuelo, se necesita para tener una referencia con los tamaños de la edad de la prótesis con la que estamos trabajando. à Durante esta semana nos hemos puesto en contacto con David para al menos poder escanearla con la Kinect que nos ha ofrecido. Lo haremos el viernes 4 a las 18:00.
Para continuar con el modelado se hace URGENTE escanear al menos el muñón del niño de Consuelo, se necesita para tener una referencia con los tamaños de la edad de la prótesis con la que estamos trabajando. à Durante esta semana nos hemos puesto en contacto con David para al menos poder escanearla con la Kinect que nos ha ofrecido. Lo haremos el viernes 4 a las 18:00.
Dentro de los avances en la parte de Diseño, podemos añadir que estuvimos estudiando un modelo que trabaja más desde la anatomía de la mano y acaban de presentar en un paper (aquí en Drive) Esto nos dio para pensar en una nueva forma de anclar los movimientos de los dedos pero que tenemos que seguir analizando.
También en el ámbito del equipo de modelado, la semana anterior tuvimos una primera reunión con Héctor y sus padres. Es un chico que también le falta una mano, pero en su caso tiene la articulación de la muñeca formada y además tiene dos pequeños deditos reconstruidos. Desde el equipo de Diseño y Modelado estuvimos estudiando el caso junto a los padres y el mismo para ver cuál puede ser la solución. En primer lugar, decidimos que es relativamente sencillo probar con una prótesis motora (sin necesidad de electrónica) o con alguna variación que le permita además utilizar sus dos deditos. El proceso a seguir ahora es buscar las alternativas y rediseñarla para su anatomía. Para ello también es necesario el escaneo de su manita que lo realizaremos también el próximo viernes.
Por la parte del equipo de electrónica, se ha avanzado en la prueba de unos nano servos, pero con poco éxito en el sentido de la poca fuerza que generan. Hemos estado buscando nuevos motores servos que cumplan una fuerza mínima y no sean grandes. Ya tenemos uno nuevo que probaremos esta semana. La diferencia de utilizar servos es que nos evitamos cualquier tipo de sensor de control de movimiento que es necesaria para los motores de revolución con los que hemos trabajado hasta ahora.
Respecto a otra de las necesidades del equipo de desarrollo, como ya se ha apuntado en otras reuniones, hemos hablado de los detalles para comenzar la interface de entrenamiento. Para entrenar y aprender a manejar la prótesis es necesario un software con algún jueguecito o algo así. Juanjo y Clara estuvieron viendo que no es excesivamente complejo (si utilizamos Arduino como placa) montar ese software que interactúe con los sensores y los motores. Y Juanjo se ofreció a comenzar a generar una parte del código que después será necesario.
Otra de las llamadas a la colaboración que venimos repitiendo en las reuniones y que unimos a la llamada de programadores es para el personal sanitario. Hasta ahora hemos contado con dos compañeras, una terapeuta ocupacional y otra médica, pero creemos que necesitamos más asistencia de estos perfiles en el proyecto. Por ello, si conocéis o sabéis de alguno que le pueda interesar participar, animadle!!
Por último, seguimos perfilando la creación de unas “Jornadas Nacionales Autogestión de Asistencias Personales” Está todo abierto, la temática, el formato, etc. Es importante que, si conocéis algún proyecto o alguien relacionado con lo que estamos haciendo en Medialab, mandad el contacto y compartid!
Sin más, nos vemos en la próxima reunión general el día 7 de marzo a las 18:00 y en las reuniones de equipo el jueves 3 a las 18:00 para desarrollo y el viernes 4 a las 17:00 para modelado.