La sesión del 9 de enero fue un poco floja de asistencia, pero con muchas novedades. Os resumo un poco:
El lunes 30 o 6 vamos a hacer una reunión interna sobre revisión de objetivos y retos para 2017. Fijaremos fecha la semana que viene. También vamos a hacer próximamente una sesión abierta con las familias, etc. Será mas adelante, ya lo hablaremos.
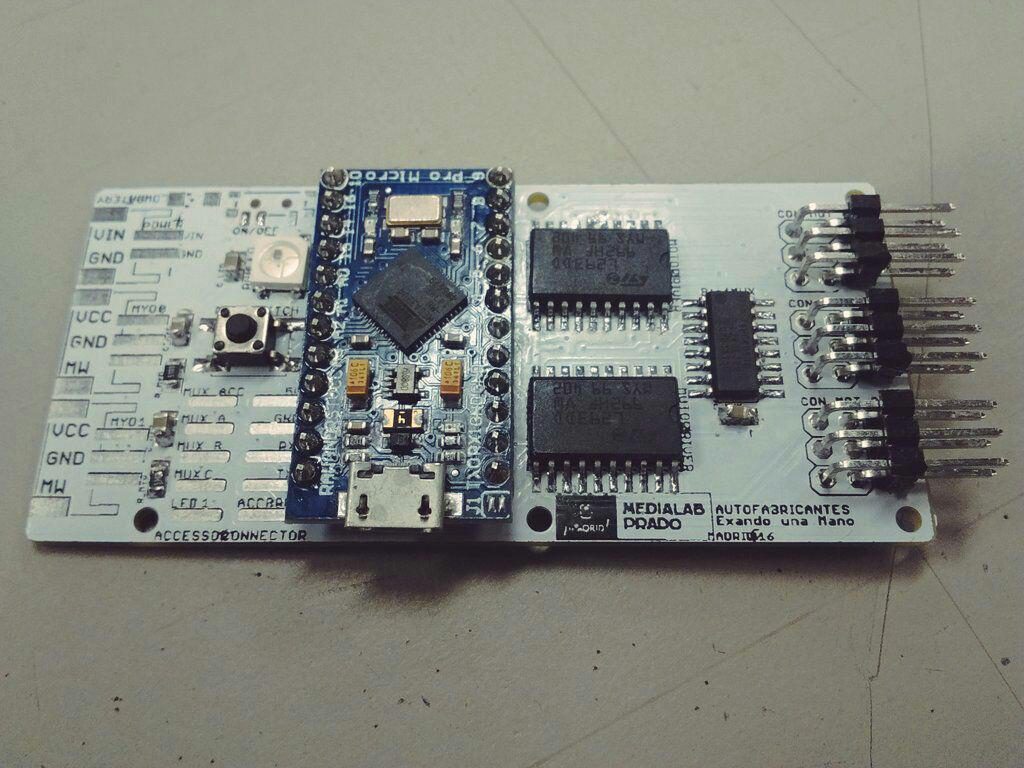
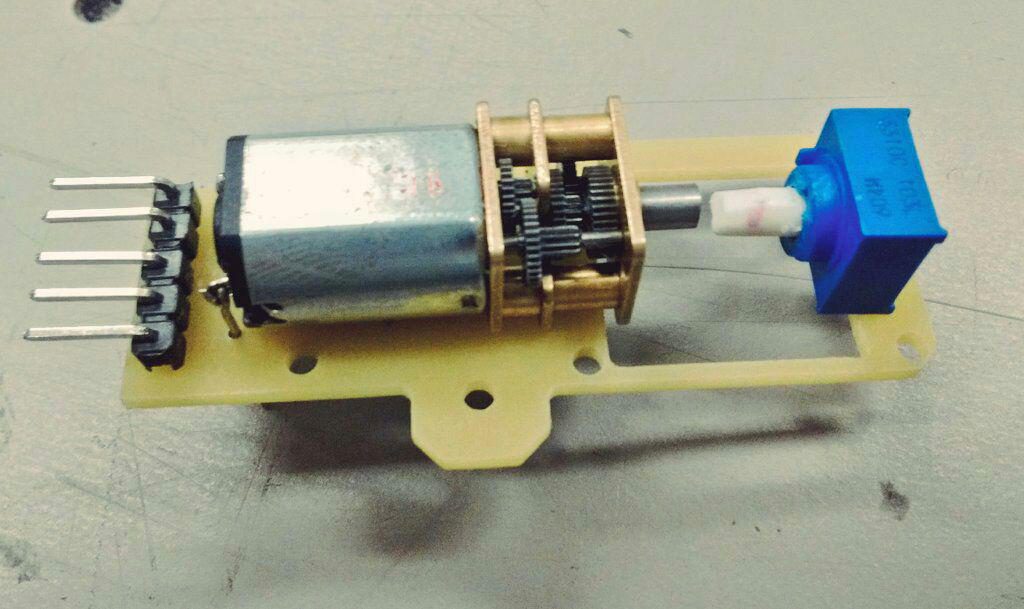
- Desarrollo:Tenemos nueva placa electrónica y es está genial!!!! Pablo ha testeado sus componentes y parece que todo va OK. A falta de ensamblar algunas cosillas, el próximo día empezaremos a trabajar con ella.La programación no ha avanzado pues Rosa necesitaba coordinar una parte con Álvaro.La placa del motor ya está lista, hemos ajustado longitud de conectores y el próximo día ensamblamos todo pues necesitamos rueda de tensor nueva y socket de sujeción.
- Diseño:La nueva articulación funciona genial. Ha sido un trabajo largo de diseño y limpieza de mallas entre Marta y Rafa que ahora empieza a ver la luz. La siguiente fase es hacer hueco para los motores… Va a estar complicado… Jeje.

– Proyecto Rafa y Jaime: revisamos la nueva unión en giro que ha impreso Luis, a falta de unos ajustes, la vemos muy bien. Luis le hace los ajustes y va a probar también con otros materiales. Antonio va a buscar el sistema de agarre de una chica que conoce.
– Proyecto Leo: hicimos una prueba con él el 4 de enero y tuvimos muy buenos resultados. Los cambios a realizar son:
/Tornillos de cierre de la palma engarzados por el lateral, mejor que por arriba.
/Ensanchar la articulación de la muñeca 5mm. Sólo la articulación, no el hueco de la palma.
/Cambiar elásticos por unos menos fuertes.
/ Cambiar el sistema de agarre de sensores para hacerlo como el de Héctor, regulable y en métrica M3.
/ Mejorar resistencia del antebrazo haciéndolo más grueso.
/ Girar 5 grados el pulgar en dirección al índice.
/ Forrar el belcro del final del antebrazo.
/ Hacer la yema de los dedos indice y pulgar más plana para sujetar cosas pequeñas y circulares.
