Hoy la sesión del 30 de enero ha sido un poco mas corta de lo ha habitual y estábamos menos que otros días.
Diseño:
- Proyecto Mioeléctrico: ya tenemos el nuevo modelo del antebrazo impreso. Diseñado por Marta e impreso por Luis, ole!! Está muy bien, nos permite ver fallos no detectados en el modelo. Es muy buena base para añadirle mejoras. Hay bastante hueco para la placa y motor.
– Hay que ajustarle el diámetro de los tornillos de cierre.
– La junta de cierre hay que añadirle una lengüetas en todo el interior
– Se puede reducir unos milímetros el alto de la caja.
– Hay que estudiar cómo salen los cables y tensor hacia la palma.
– Le quitamos los tetones interiores de agarre, no son necesarios y ganamos espacio.
– Estamos a la espera de un nuevo escaneo 3D para poder adaptar mejor la forma del antebrazo.
– También pensamos en un sistema de cierre con pestañas o carril.
- Proyecto Rafa – Jaime:
– Luis trae un nuevo accesorio para el vaso, tarda menos en imprimirse y funciona bien.
– El gadget para cerrar botones hay que cambiarlo.
– El diseño nuevo de la palma está en marcha y lo que hay hasta ahora esta correcto.
Desarrollo:
- Los motores con encoders estudiados nos dice Pablo que no nos valen por que son absolutos. Por tanto, si falla parte de la mecánica, se pierde. Habría que buscar un encoder relativo.
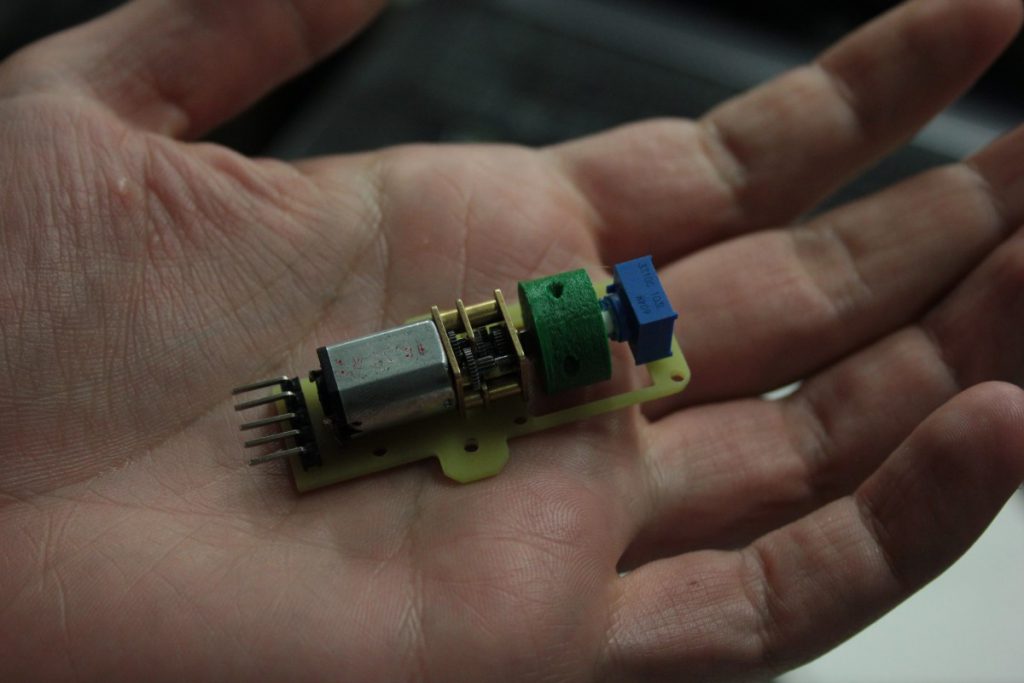
- Pablo nos cuenta una nueva manera de conectar el motor y potenciómetro en el modelo actual y ganarle 4mm de largo. Va a probar esta semana.
- Control y señales: Rosa propone investigar en control por voz o algo parecido como alternativa a los sensores mioeléctricos. Seguiremos investigando en esta dirección.
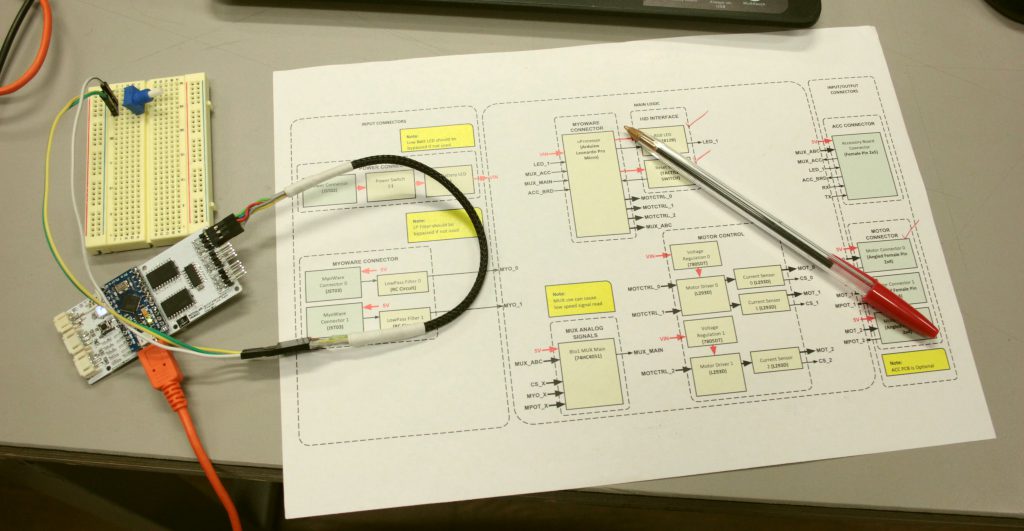
- Nuevas pruebas con la placa…