Estuvimos un total de 20 personas en esta sesión del 23 de enero ¡todo un récord! Además de los avances semanales de cada área, este lunes hicimos una sesión corta pero intensa de evaluación y actualización global del equipo y el proyecto.
La sesión de trabajo fue más corta de lo habitual pero muy productiva por los avances semanales realizados:
Desarrollo:
- Javi ha investigado sobre nuevos motores que nos permitan reducir tamaños aumentando un poco los costes.
- Por un lado encuentra estos de Pololu con un encoder trasero con las mismas funciones que el nuestro actual, el problema que apunta Álvaro (ya los usa en su Dextra) es que hay que reposicionarlos cada vez que se enciende. Tiene un coste de unos 30€
- También nos enseña los de Maxon, uno en concreto con dimensiones muy ajustadas ∅8mm y un coste bajo respecto a los de esa gama, 250€
- Después de evaluar y consensuar si es pertinente subir los costes por motor para mayor fiabilidad o apostar por menor coste y accesibilidad investigando en un mejor control del encoder. Al final hemos decidido probar el Pololu con su encoder y ver las posibilidades de control.
- Nueva placa electrónica: Pablo y Clara siguen poniéndola a punto y han encontrado un pin mal colocado, pero lo han podido solucionar en la misma sesión con un bypass.
- Código: Álvaro ha encontrado unos fallos en el código de la semana pasada y ya está solucionado. Uno de ellos era un comentario sobre uno de los sensores que afectaba de manera negativa sobre el otro sensor. También se ha detectado que en las pruebas de la semana pasada uno de los sensores daba ruido sobre el otro.
- Esta semana vuelven a probar con los sensores de Álvaro y creo que volvían a dar fallo de lectura.
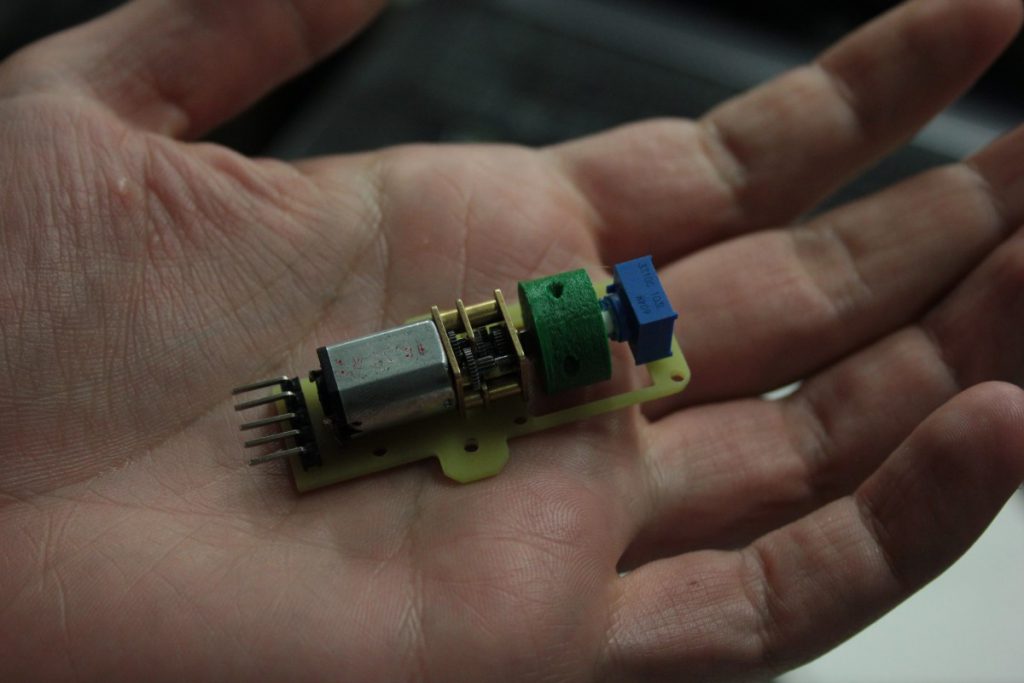
Motor y encoder: se monta y sueldan todas las partes del motor con el potenciómetro. Todo encaja perfectamente.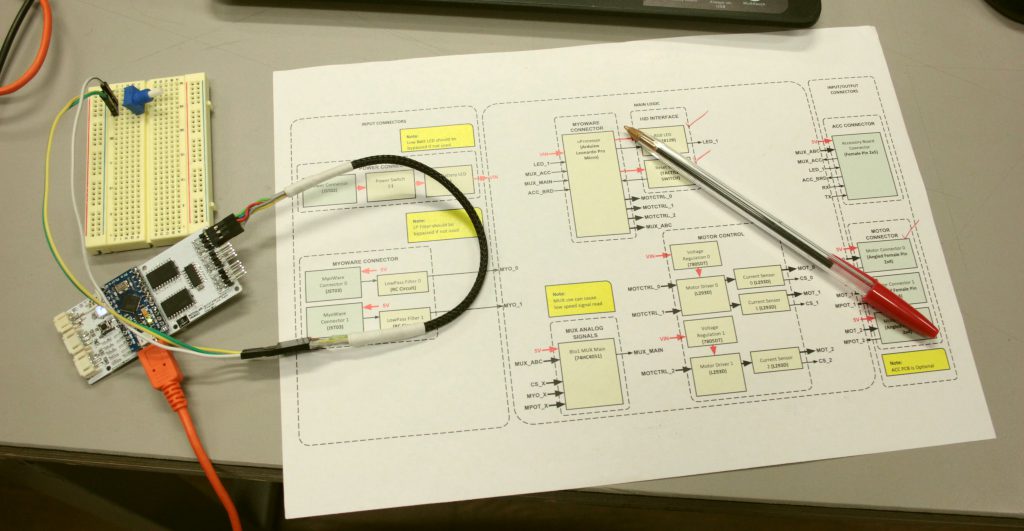
Diseño:
- Diseño propio mioeléctrica:
- Marta nos trae el 3D completo del antebrazo con la caja para un motor y la electrónica. Se compone de 3 piezas (antebrazo, tapa y junta elástica). A priori parece bastante grande, pero está ajustada a los tamaños interiores de electrónica. La semana que viene tendremos el modelo impreso, evaluamos y vemos de qué manera se puede integrar mejor todo el diseño del antebrazo.
- Luis ha traido impresos las tres versiones de palma con los huecos para los motores. Comprobamos con los motores físicos y montados en la placa que no caben en ninguna de las versiones, las pestañas de sujeción molestan o rozan en alguna de las partes. También vemos que hay algunas disposiciones que no permiten un buen montaje o mantenimiento. Quedamos esta fase parada mientras se decide si continuamos con este sistema de encorder o probamos con los de Pololu.

- Proyecto Jaime-Rafa:
- Luis ha seguido integrando los gadget con los diferentes enganches.
- Debatimos sobre el gadget del cuchillo para ver cual es la mejor solución. Melania nos enseña algunas soluciones que conoce.
- Paola va a probar una espuma polimórfica que tiene por si nos sirviera para el interior del cuchillo y que se pueda sujetar cualquier tipo.