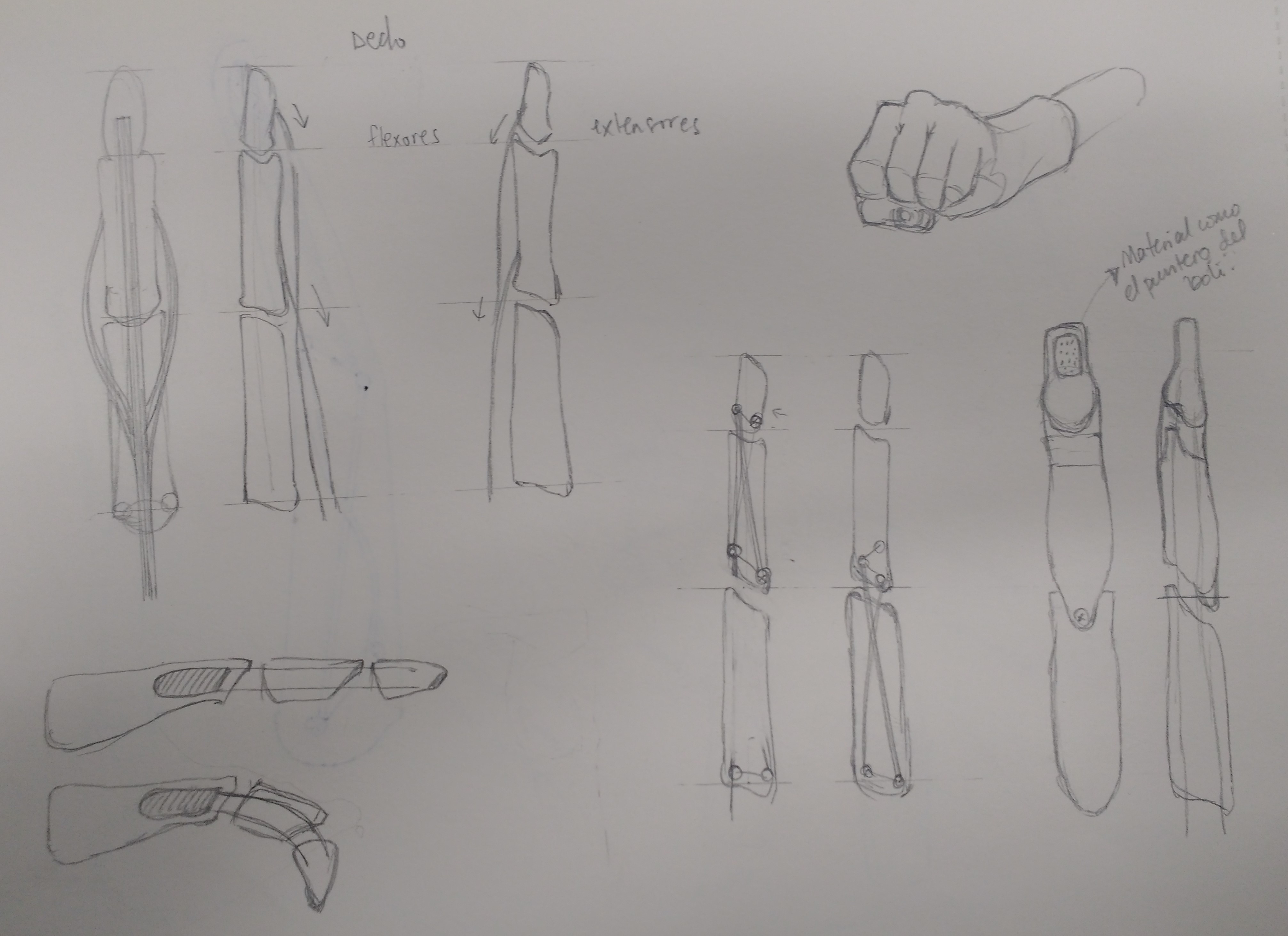
Asisten a la reunión 5 miembros del grupo en la que se debatieron muchos aspectos claves del diseño sobre parte de los desarrollos realizados desde la última reunión. Karina nos enseña sus bocetos (abajo*) y estudios sobre las posibilidades que ha ido pensando para el diseño de la prótesis; también trajo un libro sobre prótesis (de todo tipo) en el que nos llama la atención un cuadro sobre materiales que se utilizan para su fabricación; desde siliconas hasta plásticos o espumas (ver foto).
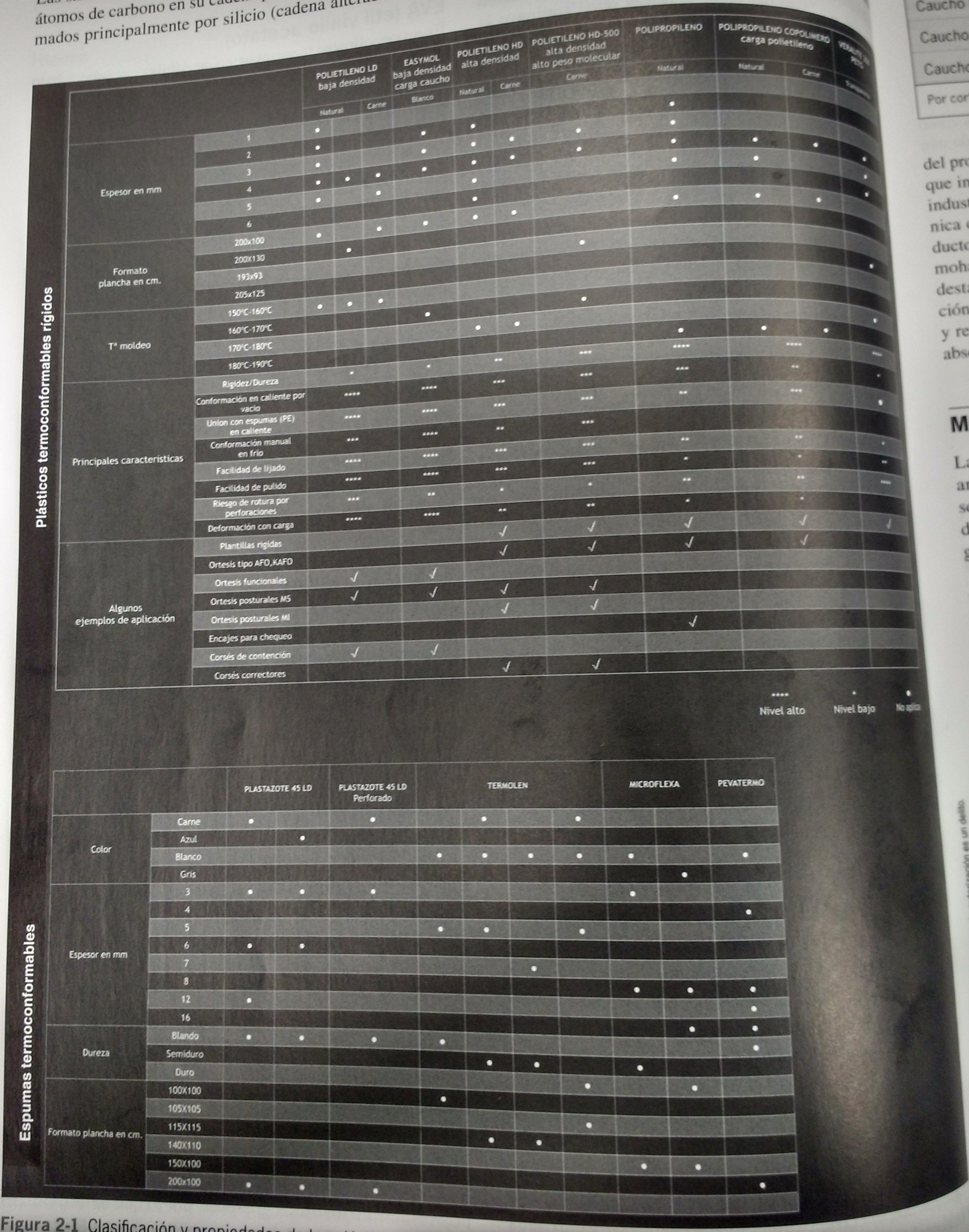
Sabemos que, aunque existan muchos materiales de avanzada tecnología, como la fibra de carbono, tenemos que restringir la elección a una opción que sea ‘lo más accesible’ y fácil de replicar, así que de momento seguimos pensando en el filaflex y en el PLA para la fabricación de la mano y, por tanto, en la impresión 3D como herramienta. Se habló sobre plásticos que se pueden termoformar con termoformadoras, pero no es una opción viable todavía (no tenemos esa posibilidad de fabricación en Medialab y los plásticos suelen ser bastante caros, además de difíciles para testear, requiere bastante conocimiento sobre el tema). No se descarta la posibilidad del uso de moldes y siliconas para determinadas partes de la prótesis, por ejemplo, fundas o guantes. Queda pendiente estudiar cuál será el material de contacto con la piel (biocompatible). Karina mencionó un tipo de material utilizado para guantes, el TPE (si no me equivoco); esto también está pendiente de investigar.
Luis también traía algunos bocetos, pero tipo ‘gadjeto brazo’, es decir, una mano completa que se acopla al muñón. Se debatió que la prótesis que se fabricaría estaría orientada a niñas con agenesia. Lo peculiar de estos casos es que suelen presentarse en manos izquierdas y que por lo general las niñas tienen un poco de palma, incluso algunos dedos en ciertos casos. Esto obliga a que el modelo sea capaz de albergar parte de la palma en su interior (al menos en uno de los diseños que se contemplan hacer), lo que complica aún más la disposición de los motores. Para ello, en el equipo de desarrollo ya se ha tenido en cuenta la posibilidad de dividir el sistema en motores por un lado en la palma y toda la electrónica, etc. en otra parte de la prótesis.
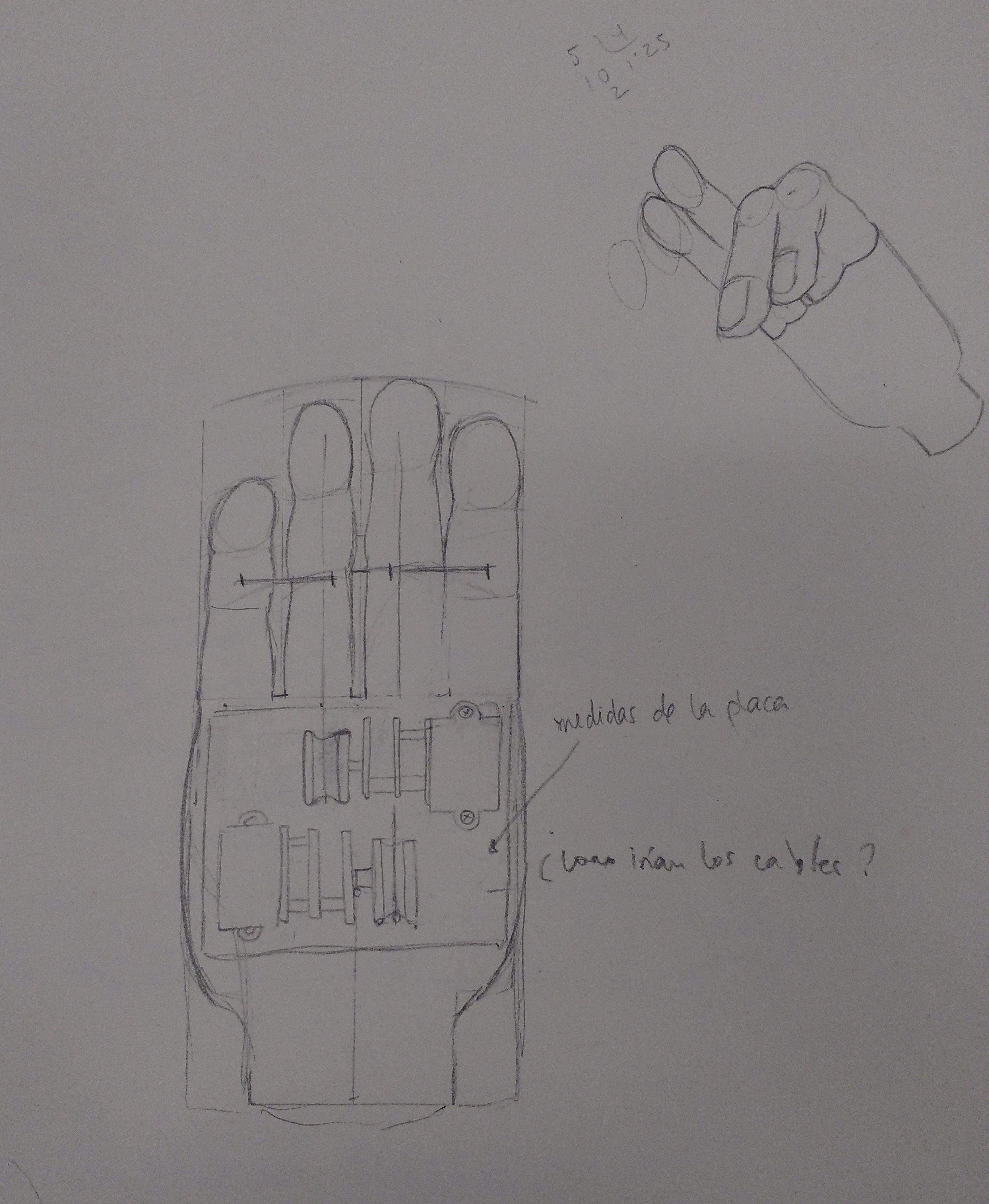
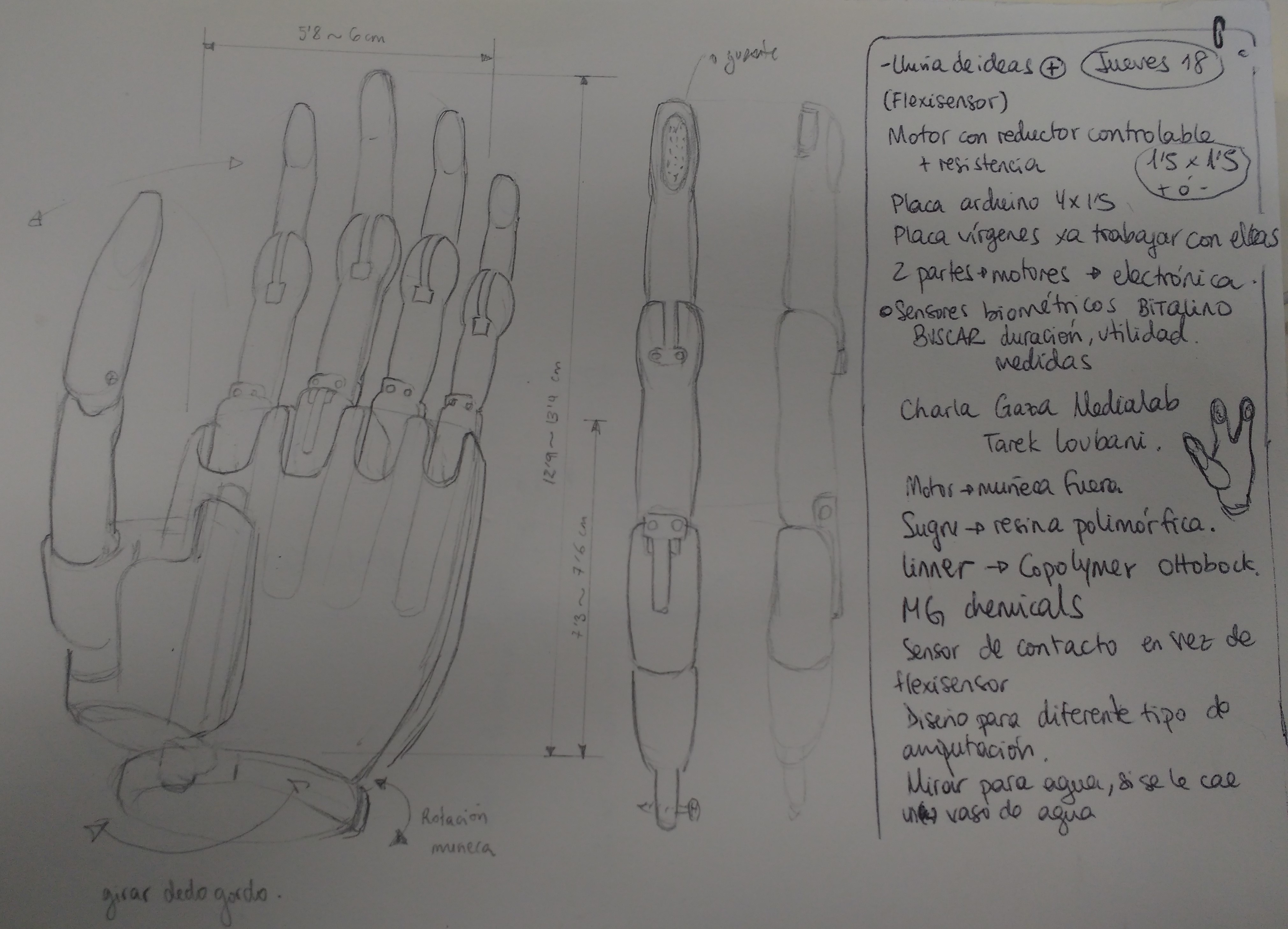
Viendo los modelos a escala 1:1, pensamos que los motores podrían estar albergados entre el comienzo de los dedos y la palma (es decir, donde están los nudillos). Ya aclaramos con Pablo,que la posición idónea de los motores sería situarlos horizontalmente en la palma. Mila ha tomado las medidas exactas para empezar a tantear el espacio con el que contamos… (se adjunta boceto con medidas). Se van a utilizar 3 motores: pulgar e índice independientes, para poder tener una pinza precisa, y otro motor que controle los restantes dedos o un conjunto de dedos, que completaran el agarre de la mano. Aquí se abrió el debate sobre la estética. ¿Mano con una forma lo más exacta posible a la humana o no?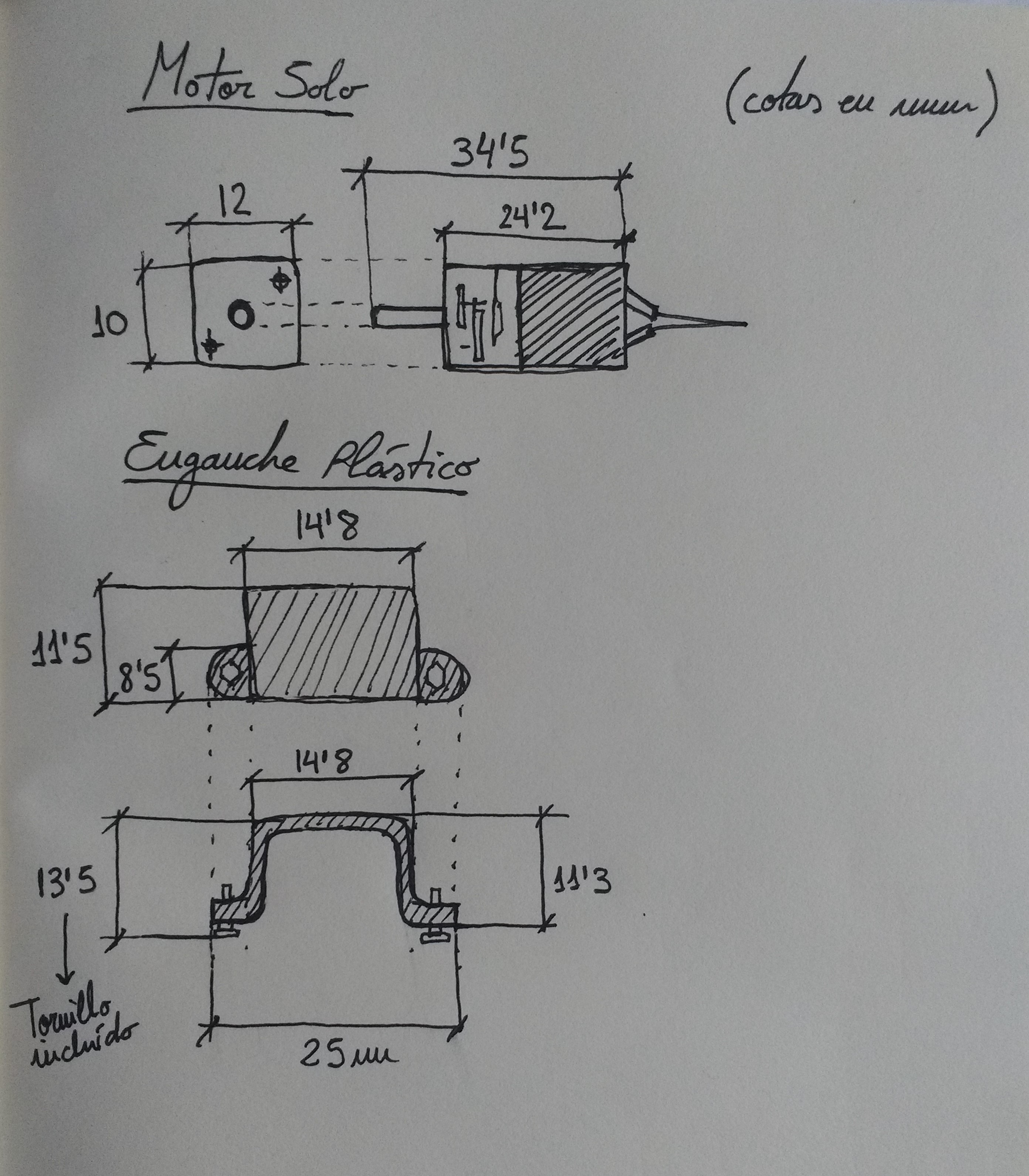
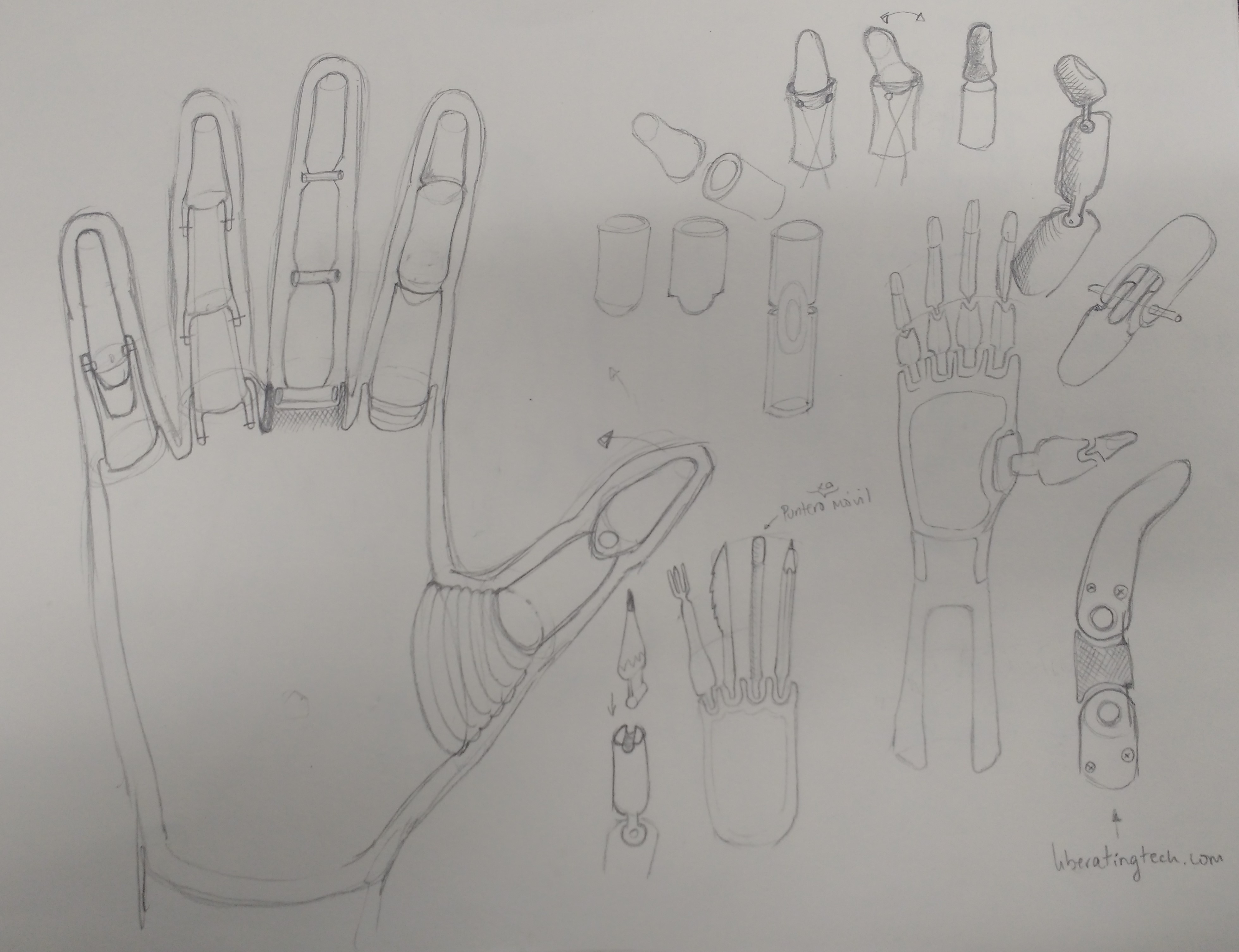
Mila aportó también sus bocetos (ver imagen) en los que se decanta por una opción menos acercada al aspecto ‘normal’ de una mano. Sobre este tema no hay quórum aún. El equipo aquel día presente, planteamos 2 opciones:
- Pulgar+índice+conjunto de 3 dedos en uno – pieza ancha que cumpla la función de éstos tres.
- Mano de 5 dedos ‘normal’, pero con meñique, anular y corazón funcionando a la vez (movidos por 1 sólo motor). Quizás este aspecto determinante de la prótesis debería ponderarse mediante el cuestionario que se va a mandar a los padres o directamente a AFANIP (asociación).
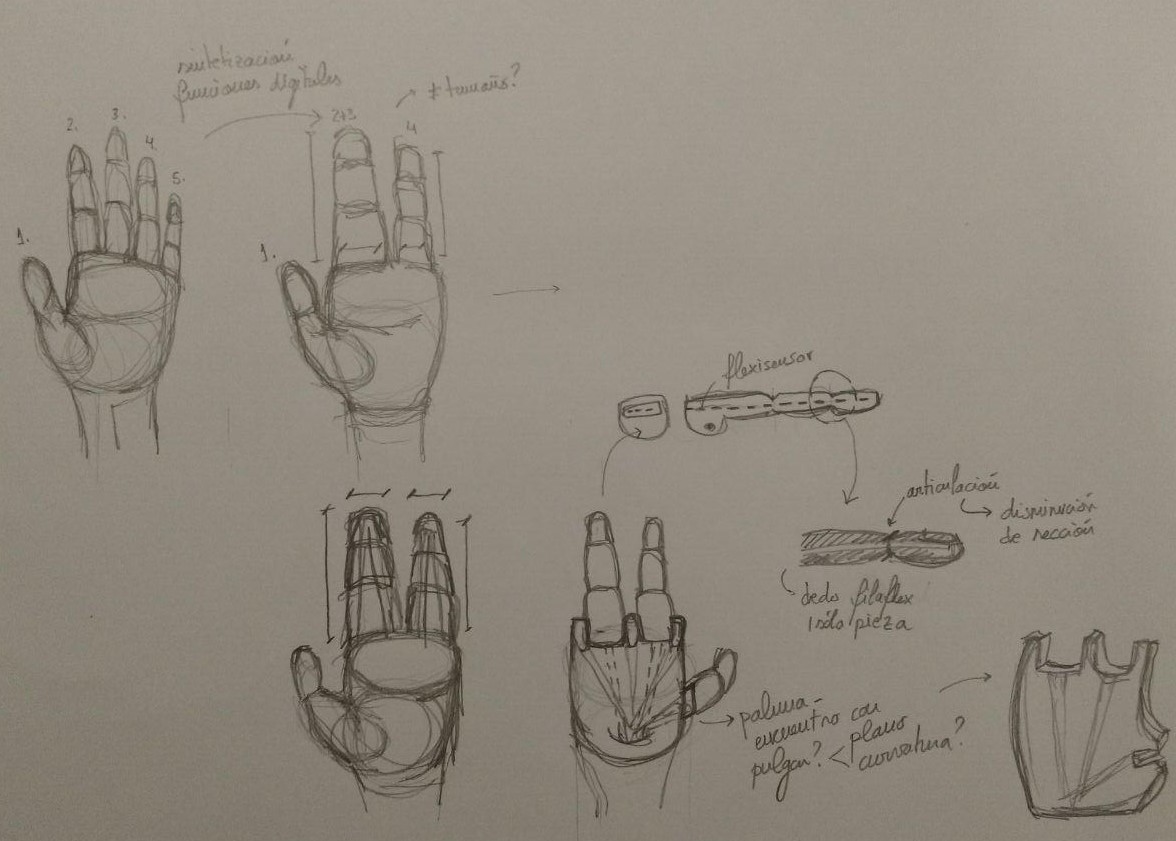
Una idea si tenemos clara respecto al diseño de la palma, es que ha de ser plana en su encuentro con el pulgar, y no como el modelo de la Flexihand.
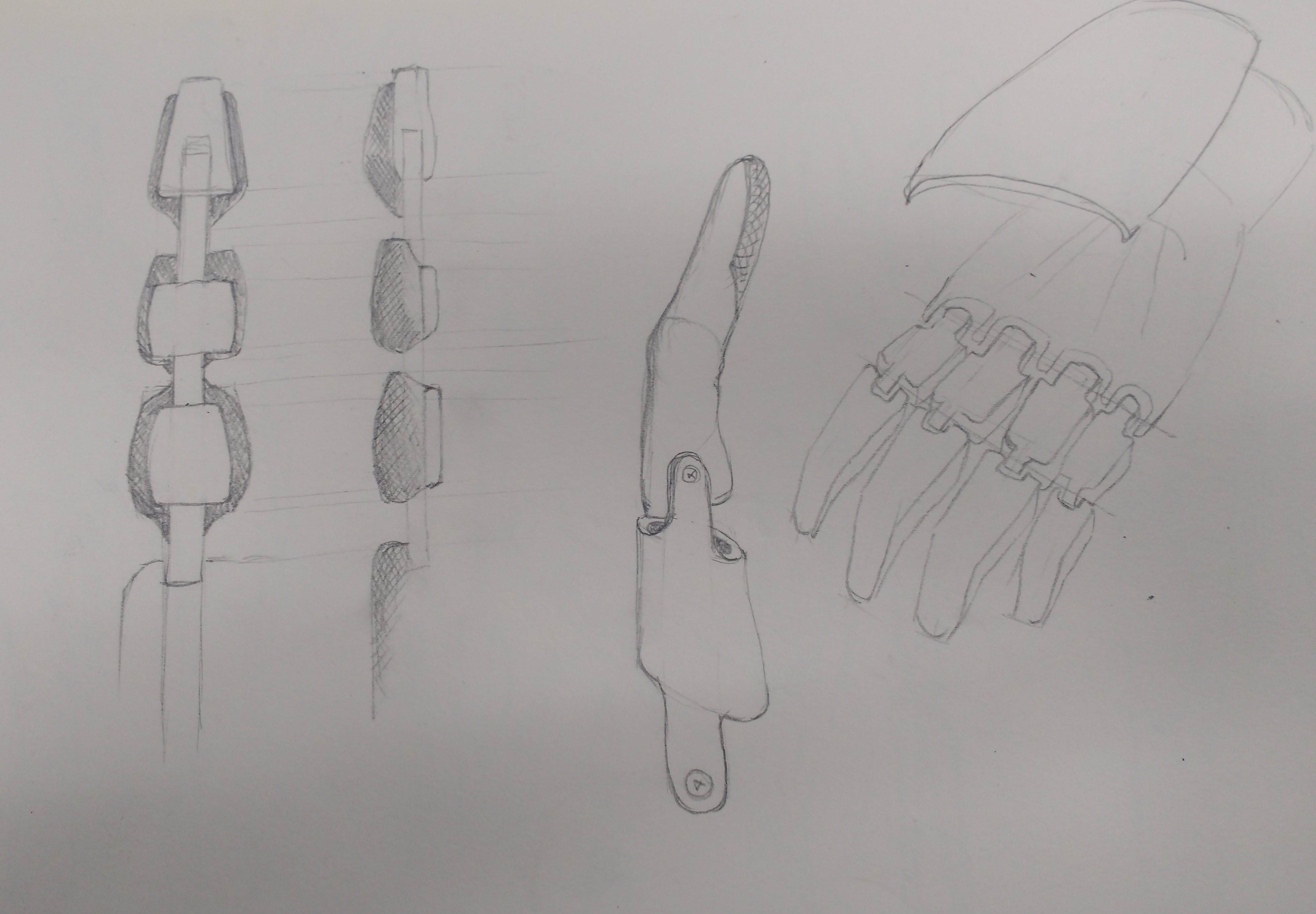
Otro de los temas debatidos y que nos ‘trae un poco de cabeza’ son las consideraciones que tenemos que tener respecto a los sensores que se van a utilizar. Empezamos optando por los Flexisensores, dado que parecía la opción más ‘fácil’ para controlar los motores a través de la flexión de los dedos. El problema es que el más pequeño de estos sensores que se comercializa en el mercado mide 7cm, demasiado grande para una prótesis de un niño o niña de 5-6 años. De todas formas, el equipo de modelado ya hemos planteado una posible opción para la fabricación de dedos a los cuáles se les pueda acoplar fácilmente estos sensores y, sobre todo, recambiarlos. Somos conscientes de que las piezas tienen que ser fáciles de desmontar y reponer en caso de que se rompan; esto también se está considerando en el diseño.
En el caso de incorporar el flexisensor, el dedo pensado estaría formado por una única pieza de filaflex (no estaría dividido por falanges, como el modelo impreso de la flexihand) albergando el sensor en la parte superior, dentro de una cavidad. Las secciones del dedo serían variables, permitiendo así que se doblen en los puntos donde es necesario. Luis y Mila bocetaron éstas ideas en unos primeros trazos.
También estuvimos pensando en cómo incorporar otro tipo de sensor alternativo que se mencionó en el grupo de desarrollo; los sensores de fuerza resistivos.
Vimos que se comercializan cuadrados y redondos, y de varios tamaños. Encontramos uno redondo de 7,6mm de diámetro, buen tamaño para la yema de los dedos finales. Sin saber exactamente cómo funcionan y qué posibilidades ofrecen, pensamos cómo se podría introducir en la prótesis, aunque esperamos concreción por parte del equipo de desarrollo. Una de las pegas de este sensor, por lo que entendimos es, por ejemplo, que no se podrían hacer gestos, dado que funcionan sólo mediante presión…
Mónica dejó apuntado una referencia que encontró, «Tact Hand», desarrollada por Patrick Slave- otra mano mioélctrica en open. Este caso es peculiar por el mecanismo usado en el movimiento del pulgar. Queda también apuntado para investigar mejor. Parece que tienen el desarrollo en Github>>
Por último, Luis apuntó la necesidad de saber las medidas de algún caso real, para encaminar el diseño; aunque él ha conseguido una ficha con los estándares por edades, sería interesante que alguno de los padres aportara fotos de ambas manos y medidas para orientarnos mejor.
Dejo apuntado un resumen con las tareas inmediatas a ir desarrollando:
-Investigar materiales biocompatibles que vayan en contacto con la piel.
-URGE: Modelado y fabricación de palma que incorpore motores + dedos a los que se pueda incorporar flexisensor u otros sensores (esto es para ir testeando ya electrónica, tamaños etc).
-Cuestionario a padres/AFANIP para responder a requisitos, entre ellos lo referente al aspecto humanoide de la prótesis.
-Toma de medidas reales de algún voluntario + fotografías de ambas manos (frente y perfil).
Nos vemos en la próxima reunión tras las fiestas.
*Bocetos de Karina