Estuvimos 5 miembros en este encuentro casi informal dedicado más a realizar tareas que a debatir o hablar ciertas cuestiones. Se unió al grupo Javier, un nuevo compañero con conocimientos en programación.
Por un lado, se diseñó e imprimió una nueva rueda adaptador para conectar el motor con los tensores, comprobamos que hay que cambiar ese diseño. Además, pudimos probar con el dedo del modelo Open Bionics impreso en filaflex la fuerza del motor, comprobamos que es demasiado rígido para la fuerza que necesitamos desarrollar. La solución es probar sobre los dedos que se usarán al final que tienen menor resistencia.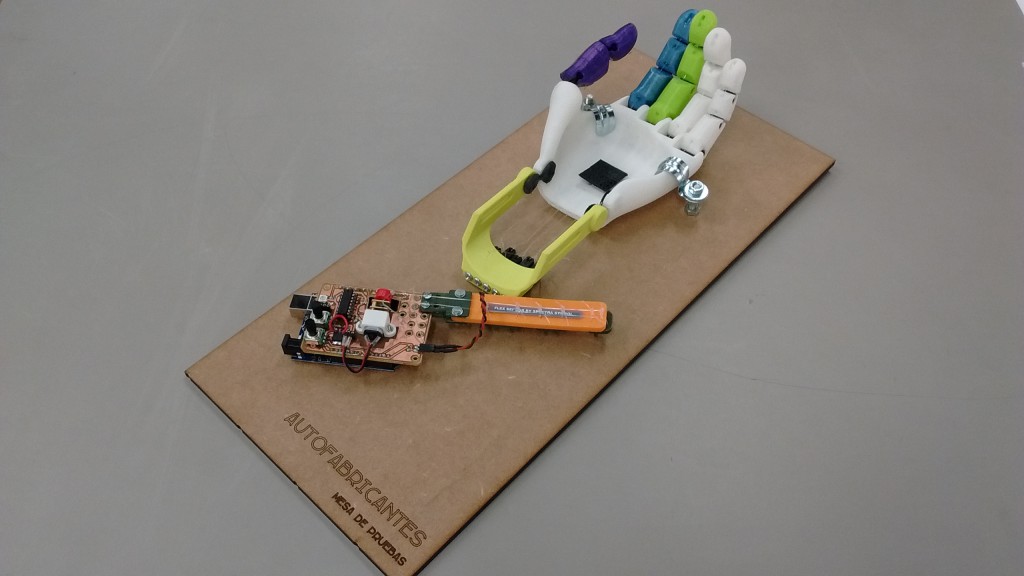
También estuvimos haciendo una nueva mesa de trabajo para anclar la mano y hacer las diferentes pruebas a partir de ahora.
Mientras tanto, los compañeros siguieron calibrando la máquina fresadora Roland específica para realizar placas electrónicas. Hay que agradecer el gran esfuerzo de Emanuele y Rubén que han puesto a punto esta máquina que estaba en desuso. Esa tarde se hicieron pruebas de calibración más precisas y dieron buenos resultados. A partir de ahora esta infraestructura queda a vuestra disposición.
Estuvimos debatiendo la posibilidad de separar los sistemas de motores y la electrónica en dos grupos para poder introducirlos en la prótesis de una mejor manera. En los próximos desarrollos lo haremos así.
Por último, nos llegó de rebote de un grupo del Taller de Interactivos que se está celebrando estos días un kit de Bitalino. Es un kit específico para biosensores de varios tipos entre ellos los que nosotros necesitamos EPD¿?. La tarea ahora es buscar las licencias de este kit, la compatibilidad con Arduino y el resto del sistema y la precisión de la señal que ofrece. Tiene muy buenas prestaciones pues se basa en una placa con varios tipos de conexiones, incluida bluetooth, entradas de sensores y un conjunto de placas muy pequeñas independientes y específicas para cada tipo de sensor.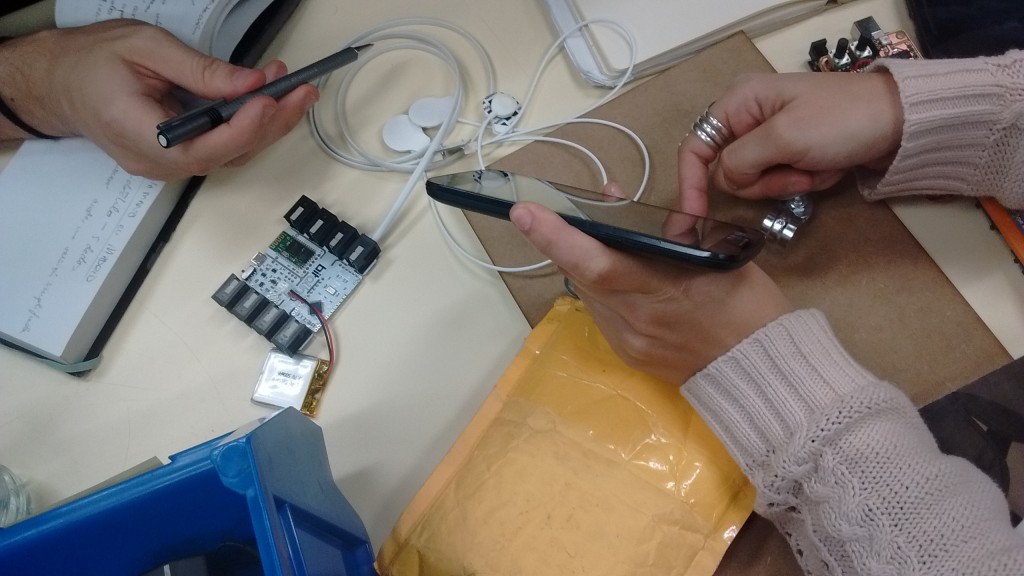
Seguimos en las próximas sesiones de desarrollo.