En esta primera reunión del equipo de diseño realizada en el FabLab de Medialab asistimos 7 miembros del grupo, algunos integrantes también del equipo de impresión 3d.
El primer tema sobre el que se debate es el flexisensor que se quiere introducir en los dedos para el control de los motores. Con uno de los dedos al 50% de tamaño podemos ver que no cabe este modelo dentro del dedo. Por ello, lo primero para poder seguir con esta opción es buscar flexisensores más pequeños o fabricar nosotros unos. Por otro lado, con el diseño del que partimos (flexihand) no podemos introducir estos sensores pues tienen puntos vulnerables en las articulaciones, habría que rediseñar. Quedan pendiente varias tareas: Buscar un sensor más pequeño, ver otras alternativas y rediseñar el dedo con la elección tomada.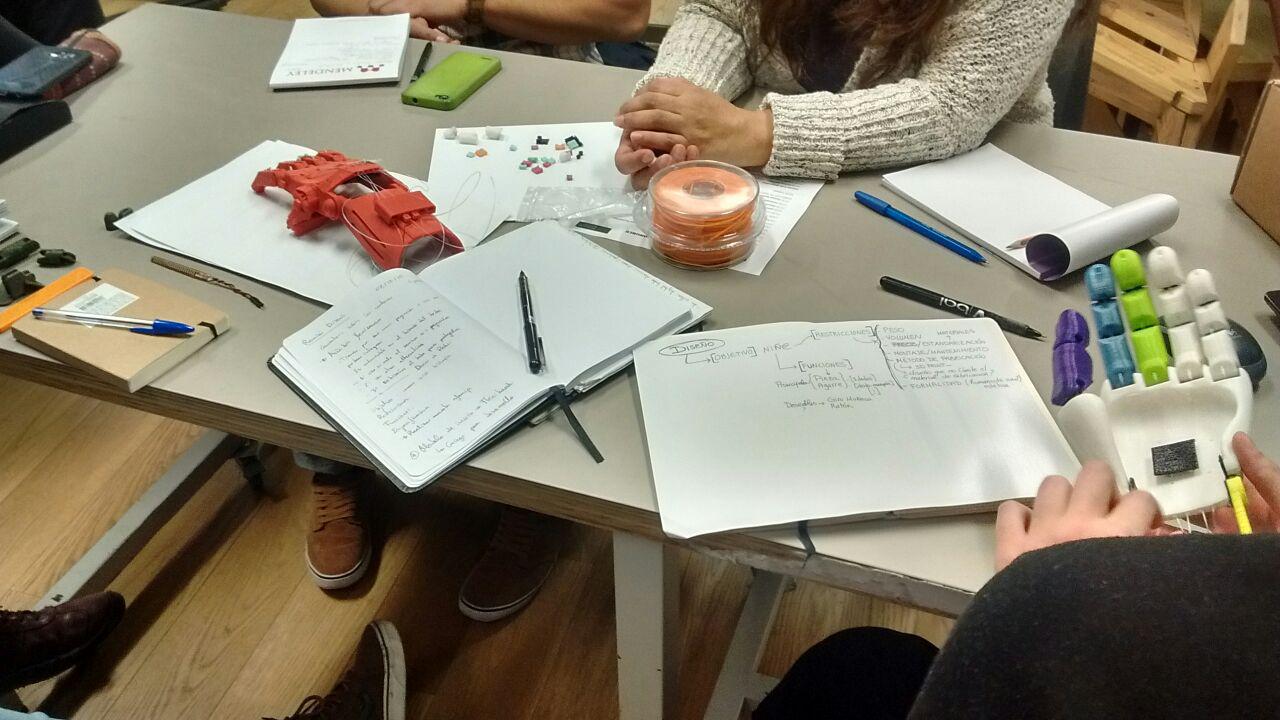
Rodri nos ha guiado un poco en este campo con sus conocimientos en la fase de idea y diseño actual. Tenemos que definir objetivos, funciones y especificaciones.
- Objetivo: Como ya se acordó en una de las reuniones generales precedentes, el objetivo es la realización de una prótesis mioeléctrica de mano para niños (6-7años) en código abierto.
- Funciones: las principales prestaciones que tiene que tener la mano también las hemos ido definiendo en las diferentes reuniones. Son realizar un agarre fuerte, una pinza y el movimiento individual del dedo índice. Como funciones deseables está el giro de la muñeca.
- Especificaciones:
- Volumen: niño de 6-7 años, longitud de la palma de unos 6cm aprox.
- Peso: la parte impresa tiene que pesar entorno a los 150gm
- Los materiales tienen que ser estandarizados para su fácil fabricación. Vamos a testear con impresión de materiales biocompatibles, que esperemos pronto sean de fácil acceso.
- El montaje y el mantenimiento debe ser lo más sencillo posible.
- La fabricación tiene que ser accesible. Aceptamos que la impresión 3d es la más accesible dentro de los métodos de fabricación digital. El diseño por tanto no debe limitar la fabricación.
- Forma: el diseño, aunque se someta a debate, entendemos que debe tender a una semejanza con la forma humana ya sea por estética o ergonomía.
- Diseño parametrizable en algunos aspectos según la edad y requerimientos de cada niño.
- Rugosidad en las yemas de los dedos o parte de la palma para mejorar el agarre.
- Tensores de los dedos cortos para menor deformación y mejorar la funcionalidad. Esto obliga a colocar los motores muy cerca de los dedos.
- Botón o función de Reset integrada en el diseño para paralizar algún movimiento o devolver la mano al estado inicial.
- Resistencia a diferentes esfuerzos. Detectamos que el diseño de flexihand no funciona bien a cierto tipo de esfuerzos en escalas más pequeñas. Tenemos que hacer un buen estudio de este ámbito añadiendo además la fragilidad que supone la impresión 3d en ciertas direcciones.
- En el debate de cada una de las especificaciones consensuamos comenzar a diseñar desde el modelo de Flexihand de Enable. Para la fase de desarrollo determinamos imprimir el modelo de Open Bionics griego para estudiar mejor su mecánica.
Para finalizar nos ponemos las tareas a continuar hasta la próxima reunión que será el 17-18 de diciembre. Ahora con todo lo hablado debemos ponernos a hacer bocetos, sin autolimitarnos para hacer el mejor diseño posible, ya lo puliremos y descartaremos cosas. Por ahora rienda suelta en el diseño!!!
Señalamos también la posibilidad de hacer una encuesta o algo así a los padres respecto al diseño para que aporten sobre todo en esta fase. También la necesidad de compartir todos los links de cosas relacionadas con el proyecto que encontramos.
Sin más, nos despedimos hasta la próxima reunión de desarrollo el día 9 y la general el día 15.