Comenzamos la reunión general con los asistentes habituales. Es importante recalcar que cualquier persona puede asistir a las reuniones y si hace tiempo que no vienes, ¡estaremos encantados de volver a verte! Todos podemos aportar en algún momento del proceso o aprender de lo que hacen los compañeros, hay muchas fases y formas diferentes de colaborar.
Resumen, los temas principales tratados han sido:
- Avances en diseño
- Debate sobre diseño de dedos
- Resumen de la sesión de escaneo del viernes 4
- Avances del proyecto de Héctor
- Prueba de materiales
- Avances y pruebas del nuevo motor
- Pedal para Ricardo

Desarrollo de la reunión:
La reunión comenzó unos minutos más tarde porque un reportero de El País nos estuvo preguntando por el proyecto. Como viene siendo habitual en estas últimas semanas y con motivos del Premio Europeo de la Cultura Princesa Margarita de Holanda, hay muchos medios que recorren Medialab entrevistando gran parte de los proyectos que se hacen aquí, entre ellos el nuestro.
Comenzamos repasando los avances en el área de Diseño que han sido muchos por todos los frentes de trabajo que hay abiertos y las reuniones de la semana pasada, hay que agradecer el gran esfuerzo sobre todo de Rafa y Luis entre otros.
- Escaneo 3D: El viernes de la semana pasada, tras un retraso inesperado a causa de los softwares, pudimos escanear a Pablo y Héctor. Era necesario tener en 3D sus muñoncitos para poder trabajar mejor en el escalado y diseño. Las mallas obtenidas ya están limpias y se puede trabajar con ellas. A causa de este contratiempo con el ordenador, no pudimos realizarlo en nuestro espacio de reuniones sino en el Fablab con todo el ruido y jaleo que había ese día. No fue en el ambiente más adecuado, pero intentaremos tener unas mejores condiciones y cuidados para la próxima ocasión.
- En ese mismo encuentro del día 5, Luis ya llevaba impresos dos tipos de manos diferentes para que Héctor las probases, se pudieran ver las escalas y eligiese la que más le gustaba. El modelo que más le gusto fue el tipo Raptor y en color verde con los dedos de otros colores. En los pasos que quedan para tener un primer prototipo que testee Héctor:
- Rafa va a modificar el diseño según las dimensiones tomadas el viernes.
- Luis se encarga de imprimirla. Lo va a hacer en su casa por comodidad, aunque saben que pueden usar las máquinas de Medialab, después se le devolverá el PLA que está gastando.
- Tensores: vamos a comprar mejores hilos de Nylon u otro material, pero esperamos a que Luis nos indique uno que conoce.
- Los tornillos necesarios son de métrica americana, tenemos que buscar unos iguales o equivalentes en métrica europea.

- Diseño Mano: En este caso, vamos a priorizar el diseño de la mano para Héctor durante esta semana mientras avanzamos también en la colocación de los motores. De todos modos, durante la reunión estuvimos un largo tiempo debatiendo sobre la resistencia y fuerza de las articulaciones de filaflex pues al cambiar de escala no funcionan bien. Hemos decidido probar una vez que se aumente la escala de los deditos actuales y hemos estudiado varias mejoras en los siguientes rediseños. En la unión de los dedos con la palma hay que aumentarla para evitar que se desprendan con poca fuerza. Por último y para seguir con el diseño de la mano, tenemos que dibujar en 3D los nuevos motores y ver cómo encajan.
Esta semana hemos tenido la oportunidad de ver diferentes tipos de materiales y diseños de dedos que ha realizado Luis para que podamos comparar. Por una parte, en los materiales traía pruebas de acero inoxidable (pesaba mucho) y de hard rubber (una especie de plástico semiduro que podríamos utilizar). Respecto al diseño, varios muy complejos pero con muy buena funcionalidad los descartamos por la dificultad de imprimirlos a pequeña escala. Trajo un diseño muy sencillo parecido a uno de Flexihand que tiene muchas posibilidades para mejorar e intentar introducir en nuestro modelo.

En el área de Desarrollo también ha habido avances. También hay que agradecer a sobre todo a Pablo todo su conocimiento y esfuerzo La semana pasada compramos un servomotor nuevo que hemos ido testeando y tiene mucha capacidad. Es muy pequeño, pesa apenas 4g y levanta casi 800g a 6V. Tenemos que resolver varios problemillas con este motor ya que cuando supera el esfuerzo que realiza la posición inicial se resetea y no se sabe dónde se queda para seguir controlándolo. Para ello tenemos que intentar acceder al motor. Por otro lado, sería interesante introducir un pequeño relé que permita tener apagado el motor cuando no está en uso. Pablo también ha propuesto dividir en dos el procesamiento electrónico, por un lado, en la palma un Arduino minipro sólo para manejar los motores y en el antebrazo el nanoarduino que tenemos ahora… lo analizaremos e intentaremos hacerlo más adelante.
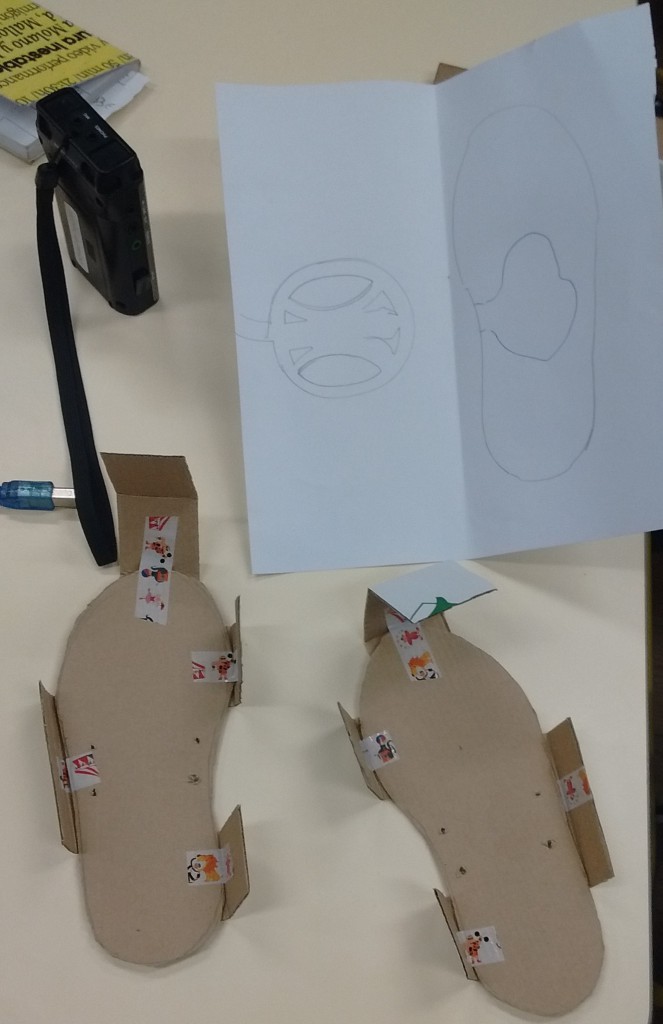
Para finalizar, Ricardo nos propuso ayudarle en una pequeña asistencia para que su nene Ricardo pueda montar bien en el triciclo nuevo (más grande) que tiene. Para poder pedalear y que no se le salgan los pies del pedal, hasta ahora habían utilizado una tira que venía, pero con el nuevo no viene y es más difícil hacer un apaño. Él nos mostró una especie de caja de cartón con la que ha prensado un prototipo y entre todos estuvimos debatiendo cuál puede ser la mejor solución. Hemos decidido fabricar una especie de suela de madera de DM agarrada con otra madera en el otro lado del pedal, a ello le añadimos unos topes laterales y unos huecos para unos velcros. Lo diseñaremos y fabricaremos en el fablab para que lo pueda probar cuanto antes.
Este tipo de ayudas junto a lo de Héctor, en mi opinión, es la parte más interesante y bonita del proyecto, pues aunque la tarea principal es el desarrollo del prototipo mioeléctrico somos un nodo de apoyo y autofabricación. En la medida de nuestras posibilidades atenderemos a estas asistencias y agradecemos enormemente que las familias confíen en este gran equipo.
Sin más, nos vemos en la próxima reunión general el 22 de marzo a las 18:00 y en otras reuniones de los equipos que iremos anunciando.